
Page 71 - 《振动工程学报》2026年第5期
P. 71
第 5 期 孙 超,等:三轴振动激励下的坐姿人体身体振动传递特性预测研究 1275
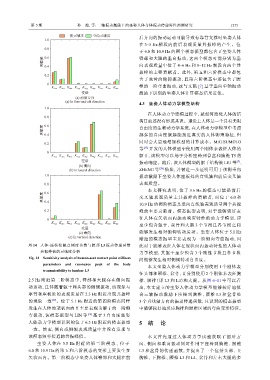
一阶灵敏度 全局灵敏度 后方向的振动运动可能导致有靠背支撑时坐姿人体
1.0
在 3~5 Hz 频段内前后表观质量共振峰的产生。位
0.8
于 6.0 和 10.9 Hz 的两个模态振型都包含了坐姿人体
灵敏度 0.6 臀部和大腿的垂向振动,这两个模态可能分别为垂
向表观质量中位于
4~6 Hz 和
8~12 Hz 频段内两个共
0.4
振峰的主要贡献者。此外,第五和六阶模态中都包
0.2
含了盆骨的俯仰振动,且第六阶模态中还包含了腰
0 椎的一阶弯曲振动,这与文献 [7] 基于垂向单轴振动
K 1cx K 2cx K 4cx K 1cy K 2cy K 4cy K 1cz K 2cz K 4cz
变量 激励下识别的坐姿人体计算模态结果近似。
(a) 前后方向
(a) In fore-and-aft direction
4.3 坐姿人体动力学模型结构
1.0
在人体动力学建模过程中,就如何简化人体的结
0.8
构目前还没有形成共识。理论上人体是一个具有无限
灵敏度 0.6 自由度的生物动力学系统,在人体动力学模型中考虑
0.4
越多的自由度就越能接近真实的人体物理特征,但
0.2 同时会大量地增加模型的计算成本。MATSUMOTO
等 [35] 开发的人体模型中使用两个刚体来表征人体的
0
K 1cx K 2cx K 4cx K 1cy K 2cy K 4cy K 1cz K 2cz K 4cz 躯干,该模型可以用于分析座椅到骨盆和胸椎 T5 的
变量 振动响应。随后,该人体模型的躯干结构被 LIU 等 、
[7]
(b) 侧向
(b) In lateral direction ZHENG 等 [28] 借鉴,并被进一步证明可用于预测垂向
1.0 振动激励下坐姿人体座板处的直线轴和前后交叉轴
0.8 表观质量。
本文研究表明,位于 3.6 Hz 的模态可能是前后
0.6
灵敏度 交叉轴表观质量主共振峰的贡献者,而位于 6.0 和
0.4
10.9 Hz 的两阶模态是垂向直线轴表观质量两个共振
0.2 峰的主要贡献者。模态振型表明,对于能够较好表
0 征人体在矢状面内振动响应特性的动力学模型,应
K 1cx K 2cx K 4cx K 1cy K 2cy K 4cy K 1cz K 2cz K 4cz 至少包含躯干、盆骨和大腿 3 个节段且各节段之间
变量
(c) 垂向 能够发生相对俯仰转动运动。坐姿人体位于 5.1 Hz
(c) In vertical direction
附近的模态振型主要表现为一阶侧向弯曲振动,因
图 14 人体-座椅接触点刚度参数与腰部 L3 振动传递函数 此对于能够表征人体在冠状面内振动特性的人体动
共振峰值的灵敏度分析 力学模型,其躯干至少包含 3 个刚性节段且各节段
Fig. 14 Sensitivity analysis of human-seat contact point stiffness 间能够发生相对侧倾转动自由度。
parameters and resonance peak of the body
本文坐姿人体动力学模型分别使用 1 个刚体表
transmissibility to lumbar L3
征头部和颈椎、盆骨,且分别使用 2 个刚体来表征胸
2.5 Hz 附近第二阶模态中,臀部和大腿存在侧向振 椎、腰椎(即 L3 和 L4)和大腿。从图 6~11 中可以看
动运动,且伴随着躯干和头部的侧倾振动,该现象与 出,本文建立的坐姿人体动力学模型能够较好地拟
靠背和座板处的表观质量在 2.3 Hz 附近出现共振峰 合三轴振动激励下座椅到胸椎、腰椎 L3 和盆骨处
的现象一致 [29] 。位于 5.1 Hz 附近的第四阶模态同样 3 个直线轴方向的振动传递函数,且识别的模态振型
发生在人体的冠状面内且主要表现为躯干的一阶侧 中能够较好地反应胸椎和腰椎区域的弯曲变形特征。
弯振动,该模态振型与 LIN 等 [34] 基于 3 自由度坐姿
人体动力学模型识别的位于 6.5 Hz 附近的模态振型 5 结 论
一致。然而,侧向或侧倾表观质量中并没有发现与
该模态频率接近的共振峰值。 本文首先通过人体动力学试验获取了前后方
坐 姿 人 体在 3.5 Hz 附 近 的 第 三 阶 模 态 、 位 于 向、侧向和垂向振动同时作用下座椅到胸椎、腰椎
6.0 和 10.9 Hz 的第五和六阶模态的变形主要发生在 L3 和盆骨的传递函数,并提出了一个包括头部、上
矢状面内。第三阶模态中坐姿人体臀部和大腿在前 胸椎、下胸椎、腰椎 L3 和 L4、盆骨和左右大腿的多