
Page 231 - 《振动工程学报》2026年第5期
P. 231
第 5 期 王程阳,等:航空发动机转子系统振动主动控制优化与试验研究 1435
增压级盘 涡轮盘 参数作用下的幅值更高,而优化后控制参数作用下
低压转子电机
控制柜 的转子幅值更低,最大振幅所在转速更加偏离原有
低压驱动电机
临界转速。转子在临界转速处的振动幅值降低效果
1支点阻尼器 5支点阻尼器
最为显著,优化后控制参数作用下的转子一倍频幅
值减振比为 58.75%,比未优化控制参数提高 5.27%。
测控平台 采集控制器 压电陶瓷 上位机
控制器 二阶优化后控制参数的转子一倍频幅值减振比为
43.17%,比未优化控制参数提高 4.40%。
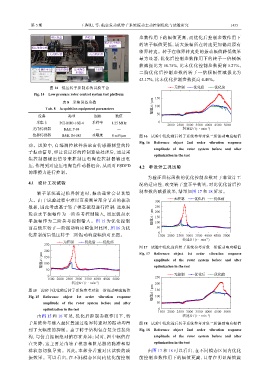
图 14 低压转子控制系统试验平台 无控制 优化后 优化前
Fig. 14 Low pressure rotor control system test platform
150
表 8 采集设备参数
Tab. 8 Acquisition equipment parameters 幅值A / μm 100
50
设备 类型 规格 数值
采集卡 PCI-MIO-16E-4 采样率 1.25 MHz 0
2000 2500 3000 3500 4000 4500 5000
−1
光电传感器 B&K P-84 — — 转速Ω / (r·min )
位移传感器 B&K IN-085 灵敏度 8 mV/µm 图 16 试验中优化前后转子系统参考对象二阶振动响应幅值
Fig. 16 Reference object 2nd order vibration response
动。试验中,自编测控软件获取由传感器测量的转
amplitude of the rotor system before and after
子振动信号,经过设定好的控制算法处理后,通过采
optimization in the test
集控制器输出信号来控制压电陶瓷控制器输出电
压,作用到对应压电陶瓷作动器组合,从而对 ESDFD 4.2 非设计工况试验
的摩擦力进行控制。
为验证目标函数的优化控制参数对于非设计工
4.1 设计工况试验 况的适应性,改变转子盘不平衡量,对比优化前后控
转子系统通过临界转速时,振动通常会显著增 制参数的减振效果,结果如图 17 和 18 所示。
大。由于试验过程中难以直接测量部分节点的振动 300 无控制 优化后 优化前
数据,因此考虑基于转子模态振型进行控制:选取涡 250
幅值A / μm 150
轮盘水平振幅作为一阶参考控制输入,增压级盘水 200
平振幅作为二阶参考控制输入。图 15 为优化控制 100
前后低压转子一阶振动响应幅值对比图,图 16 为优 50
0
化控制前后低压转子二阶振动响应幅值对比图。 1500 2000 2500 3000 3500 4000 4500 5000
−1
转速Ω / (r·min )
无控制 优化后 优化前
250
图 17 试验中优化前后转子系统参考对象一阶振动响应幅值
幅值A / μm 200 Fig. 17 Reference object 1st order vibration response
150
amplitude of the rotor system before and after
100
50 optimization in the test
0 250 无控制 优化后 优化前
1500 2000 2500 3000 3500 4000 4500 5000
−1
幅值A / μm 200
转速Ω / (r·min )
图 15 试验中优化前后转子系统参考对象一阶振动响应幅值 150
Fig. 15 Reference object 1st order vibration response 100
amplitude of the rotor system before and after 50
optimization in the test 0
1500 2000 2500 3000 3500 4000 4500 5000
−1
由图 15 和 16 可见,优化后控制参数作用下,转 转速Ω / (r·min )
子系统参考输入盘位置通过临界转速时的振动均得 图 18 试验中优化前后转子系统参考对象二阶振动响应幅值
到了大幅度的抑制。由于转子结构包含复杂连接结 Fig. 18 Reference object 2nd order vibration response
构,与仿真振幅绝对值存在差异;同时,图中幅值存 amplitude of the rotor system before and after
在突降,这主要是由转子模态和阻尼器的黏滞和滑 optimization in the test
移状态切换导致。因此,本部分着重对比试验的减 由图 17 和 18 可以看出,在不同模态区间内优化
振效果。可以看出,在不同模态区间内优化前控制 前控制参数作用下的幅值更高,且存在明显幅值震