
Page 236 - 《振动工程学报》2026年第5期
P. 236
1440 振 动 工 程 学 报 第 39 卷
限,如风机塔筒的减振。 u 1 、u 2 为 惯 容 元 件 两 端 位 移 , ¨ u 1 、¨u 2 为 对 应 的 加 速
[4]
SMITH 提出一种小质量两端点机械元件“Inerter”, 度。因此 TMDI单自由度系统的运动方程可描述为:
后来有学者将其称为惯容。与传统的质量元件相 m 2 ¨y 2 +k 2 (y 2 −y 1 )+c 2 (˙y 2 − ˙y 1 )+b(¨y 2 − ¨y 1 ) = 0 (1)
比,惯容元件在基本不改变结构物理质量的前提下, 式中, x 1 和 x 2 分别为振子两端的位置坐标; 和 分别
y 2
y 1
可以实现对惯性特性的调整。由于惯容的质量放大 为主结构位移和振子位移; m 1 和 m 2 分别为主结构质量
效应 [5] 和阻尼增效机制 ,将它加入阻尼器可以显著 和 TMDI 振子质量; c 2 和 分别为 TMDI 的阻尼和刚度。
[6]
k 2
提高原阻尼器的性能,并有效控制结构的振动。惯 常见惯容包括齿轮-齿条式、液压式、电磁式、
容在结构振动控制领域有着广泛的应用。在过去的 滚珠丝杠式等类型。其中,齿轮-齿条式惯容在高频
几年里,已经研发出了多种基于惯性元件的振动控 振动下,齿轮和齿条之间可能会出现相对滑动,导致
制装置,包括调谐惯容阻尼器(TID) [7] 和调谐质量阻 效率降低;同时,液压式和电磁式惯容结构复杂、制
尼惯容器(TMDI) [8] 等。MARIAN 等 [9] 提出了 TMDI 造和维护成本较高;相较之下,滚珠丝杠式成本较
最优化的首个解决方案,基于定点理论,导出了最佳 低,而且具有精度高、控制精确的优点。因此本研
调谐频率和阻尼比的封闭方程。ASAMI 等 [10] 导出 究选取滚珠丝杠作为惯容的关键组成部分。
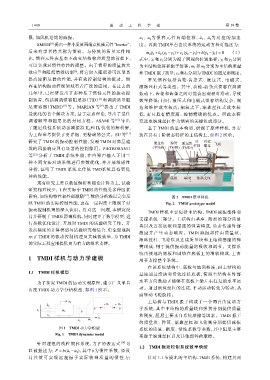
了阻尼线性系统动态减振器 H ∞ 和 H 2 优化的解析解, 基于 TMDI 的基本构型,研制了原理样机,并安
为工程参考提供了更详细、更精确的公式。SU 等 [11] 装在具有 1 阶模态特征的主结构上,如图 2 所示。
研究了 TMDI 的振动控制性能,发现 TMDI 对高层建 质量块 弹簧 质量块 丝 丝杠 飞轮
筑的风振响应具有显著的控制作用。PIETROSANTI (主结构) (TMDI) (TMDI) 杠轴 螺母
等 [12] 分析了 TMDI 系统性能,在白噪声输入下用三
种不同方法对该系统进行参数优化,并开展敏感性
分析,证明了 TMDI 系统比传统 TMD系统具有更优
异的性能。
弹簧 底板 基座 轴承支座
现有研究主要以数值解析和理论计算为主,试验 (主结构)
研究相对较少,工程实际中 TMDI 的性能受多种因素
影响,如结构特性和外部激励 [13] ,数值分析难以完全反 图 2 TMDI 模型样机
映 TMDI 的实际控制性能,这在一定程度上限制了对 Fig. 2 TMDI prototype model
振动控制机理的深入认识。针对这一问题,本研究设
TMDI 样机主要包括主结构、TMDI 减振部件和
计并研制了 TMDI 原理样机,同时建立了数学模型,进
支撑系统三部分。主结构由基座、附加的部分质量
行参数优化设计,开展对 TMDI 的试验研究工作。开
块以及连接底板和基座的弹簧构成,负责传递外部
发高精度的计算模型与试验研究相结合,更全面地揭
激励并产生动态响应。TMDI 减振部件由质量块、
示了 TMDI 的振动控制机理及其减振效果,为 TMDI
滚珠丝杠、飞轮以及连接质量块和主结构基座的弹
的实际工程应用提供更为有力的技术支持。
簧组成,用于提供振动能量的吸收和调节。支撑系
统由接地的底板和固结在底板上的滑轨构成,主要
1 TMDI 样 机 与 动 力 学 建 模 用于支撑整个系统。
在该系统结构中,底板与地面相连,而主结构的
1.1 TMDI 样机模型 基座通过滑块和滑轨连接底板,使得主结构在外部
为了探究 TMDI 的运动实现原理,建立广义单自 水平方向激励下能够在底板上做左右往复的水平运
由度 TMDI 动力学分析模型,如图 1 所示。 动。通过滚珠丝杠的连接,平动运动转化为转动,从
而驱动飞轮旋转。
主结构与 TMDI 振子构成了一个两自由度动力
y 2
u 1 u 2
k 2
F F 学系统,其中主结构的质量块和弹簧分别提供质量
x 1
b
m 2
c 2 和刚度,阻尼主要来自系统摩擦等因素。TMDI 振子
y 1
m 1
的质量块、弹簧、滚珠丝杠和飞轮则分别提供减振
x 2
图 1 TMDI 动力学模型 系统的质量、刚度、惯性系数等参数,其中阻尼主要
Fig. 1 TMDI dynamics model
来源于滚珠丝杠以及其他部件的摩擦。
针对理想的线性惯容系统,力 F 的表达式 [14] 可
1.2 TMDI 振动控制系统数学模型
以被描述为: F = b(¨u 1 − ¨u 2 ),其中 b为惯性系数,经设
计 其 值 可 实 现 远 超 振 子 实 际 物 理 质 量 的 惯 性 力; 针对 1.1 节提出的主结构-TMDI 系统,构建其两