
Page 240 - 《振动工程学报》2026年第5期
P. 240
1444 振 动 工 程 学 报 第 39 卷
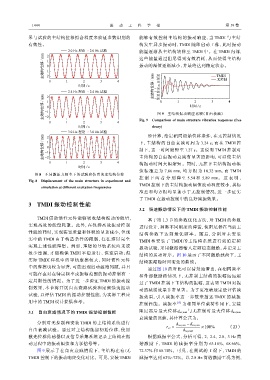
果与试验的主结构位移拟合程度来验证参数识别的 能够有效控制主结构的振动响应,当 TMDI 与主结
有效性。 构发生异步振动时,TMDI 随即启动工作,此时振动
2.0 Hz 理论 2.0 Hz 试验 能量逐渐从主结构转移至 TMDI 中。在 TMDI 内部,
主结构位移 / mm −1 1 0 振动的幅值逐渐减小,并最终达到稳定状态。
2
这些能量通过阻尼得到有效消耗,从而使得主结构
−2
20
无控制
0 1 2 3 4 30 TMDI
10
时间 / s 主结构位移 / mm −10 0
2.4 Hz 理论 2.4 Hz 试验 −20
−30
主结构位移 / mm −1 1 0 图 9 主结构振动响应比较(自由衰减) 4
2
−40
2
3
1
0
时间 / s
−2
0 1 2 3 4 Fig. 9 Comparison of main structure vibration responses (free
时间 / s decay)
3.0 Hz 理论 3.0 Hz 试验 经计算,给定相同初始位移条件,在无控制情况
主结构位移 / mm −1 1 0 下,主结构的自由衰减时间为 3.24 s;而在 TMDI 控
2
TMDI 控制对
1.27 s。这说明
制下,这一时间缩短至
−2
0 1 2 3 4 主结构的自由振动衰减有显著的影响,可以使主结
构振动时间大幅缩短。同时,无控下主结构振动幅
时间 / s
值 标 准 差为 7.86 mm, 均 方 根 为 10.32 mm, 而 TMDI
图 8 不同激振力频率下的试验和仿真的主结构位移
控 制 下 两 者 分 别 降至 5.54 和 5.89 mm。 这 表 明 ,
Fig. 8 Displacement of the main structure in experiment and
TMDI 控制下的主结构振动幅值波动程度较小,其标
simulation at different excitation frequencies
准差和均方根均显著小于无控制情况,进一步证实
了 TMDI 在振动控制中的良好减振效果。
3 TMDI 振 动 控 制 性 能
3.2 强迫振动情况下的 TMDI 振动控制性能
TMDI 借助惯性元件能够吸收结构振动的能量,
基于第 1.3 节的参数优化方法,对 TMDI 的参数
实现高效的能量耗散。此外,在保持高效振动控制 进行设计,调整不同刚度的弹簧,使阻尼器在当前主
性能的同时,实现装置质量和体积的显著减小,但现 结 构 参 数 下 达 到 最 优 频 率 。 随 后, 分 别 对 未 安 装
实中的 TMDI 由于构造条件的限制,往往难以完全 TMDI 和安装了 TMDI 的主结构系统进行强迫定频
实现上述性能理想。例如,理想的导轨系统应无或
振动试验,采用激振器输入定频稳态激励,并记录主
极少摩擦,才能确保 TMDI 平稳运行、快速启动;但
结构的运动时序。图 10 展示了不同激励载荷下,主
实际 TMDI 样机中的导轨摩擦较大,同时惯性元件 结构振幅随时间变化的曲线。
中的摩擦也较为显著,可能出现启动困难问题,并且 通过图 10 的对比可以清楚地看出,在相同频率
可能存在对在特定频率或振幅范围的振动控制有一
和外部激励的情况下,无控制主结构的振幅远远超
定局限性的情况。为了进一步验证 TMDI 的振动控
过了 TMDI 控制下主结构的振幅,这表明 TMDI 对振
制效果,本节将开展自由衰减试验和定频强迫振动
动的减缓效果非常显著。为了更准确地定量评估减
试验,以评估 TMDI 的振动控制性能,为实际工程应
振效果,引入减振率这一参数来描述 TMDI 的减振
用中的 TMDI 设计提供参考。
控制性能。减振率 [17] 为相同单位载荷作用下,安装
3.1 自由衰减情况下的 TMDI 振动控制性能 阻尼器后最大位移 d co,max 与无控制时最大位移 d no,max
衰减量的比值,其计算公式为:
分别对无控制和安装 TMDI 的主结构系统进行
r vc = d no,max −d co,max ×100% (23)
自由衰减试验。通过对主结构施加初始位移,使用 d no,max
激光位移传感器以及信号采集系统记录主结构在振 根据减振率公式,分析可得,2、2.4、2.8、3 Hz 简
动过程中的振动幅值和力学信号等。 谐 激 励 下, TMDI 的 减 振 率 分 别 为 63.18%、 68.66%、
图 9 展示了在自由衰减情况下,主结构在有/无 72.37% 和 68.74%。可见,在测试的工况下,TMDI 的
TMDI 控制下的振动响应变化对比。可见,安装 TMDI 减振率达到 63%~72%。以 2.8 Hz 简谐激励工况为例,