
Page 215 - 《振动工程学报》2026年第5期
P. 215
第 5 期 赵晏萱,等:振动主动控制双梯度均衡算法研究 1419
( ) ( 2 )
2
J 2 (W) = E y (n) (7) ε = E y (n) − E max ×100% (11)
E max
其更新公式为:
式中, NR为误差控制量 NR 值与输出信号功率的比
W(n+1) = W(n)−2µ 2 y(n)X(n) (8) 值,其物理意义是单位输出功率下算法的误差控制
在设定的输出信号功率 E ma 附近,根据输出信
x
量, NR越大,表示相同约束下算法的控制效果越好;
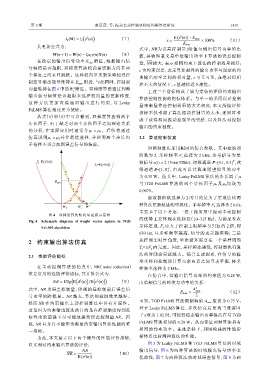
号幅值是否超限,双梯度算法权向量更新方向在两
ε 为约束误差,表示算法最终的输出功率与设定的约
个梯度之间来回跳跃。这种权向量更新策略使得控
束输出功率之间的相对量,ε 可正可负,在绝对值相
制信号输出能量维持在 E ma 附近,与此同时,控制权
x
差不大的情况下,ε 值越接近 0 越优。
向量维持在图 4 中的 W 附近。双梯度算法通过判断
∗
c 上述三个指标构成了较为完备的评价约束输出
输出信号幅值是否超限来选择权向量的更新梯度,
算法控制性能的指标体系。与单一的采用误差控制
这 种 方 法 更 加 直 接 地 对 输 出 进 行 约 束, 与 Leaky
量来衡量算法控制效果的方式相比,本文所提评价
FxLMS 算法相比更为便捷。
指标不仅考虑了算法振动控制量的大小,还同时考
从式(6)和(8)中可以看到,双梯度算法有两个
虑了获得相同振动控制量的代价,以及算法对控制
步长因子,由于缺乏对两个步长因子之间理论关系
输出的约束程度。
的分析,在实际应用时通常令 µ 1 = µ 2 。后续将通过
仿真说明 µ 1 = µ 2 并非最优选择,并指明两个步长因 2.2 算法控制仿真
子选择不当会加剧误差信号的振荡。
对两种算法采用相同的仿真参数。其中滤波器
阶数为 2,采样频率 F s 选择为 2 kHz,参考信号为单
J 2=E(y 2 (n)) 频信号 x(t) = 2.15sin(320πt),初级通道 P=[0.1, 0.3] ,次
T
J 1 =E(e 2 (n))
T
级通道 S=[1, 0] ,由此可以计算出期望信号的功率
为 0.35 W。仿真中,Leaky FxLMS 算法的步长因子 µ
与 TGD FxLMS 算法的两个步长因子 µ 1 及 µ 2 均设为
E max
0.0075。
滤波器阶数选择为 2 的目的是为了实现后续两
种算法更新轨迹的可视化。采样频率 F s 选择为 2 kHz,
* W *
W 0 W c
主要基于以下考虑:一是工程应用中振动主动控制
图 4 双梯度算法权向量更新示意图
的优势主要体现在低频段(10~315 Hz),为满足香农
Fig. 4 Schematic diagram of weight vector update in TGD
采样定理,F s 应大于控制上限频率 315 Hz 的 2 倍,即
FxLMS algorithm
630 Hz,且采样频率越高,信号的表示越准确;二是
2 约 束 输 出 算 法 仿 真 从控制实时性角度,单次循环需要在一个采样周期
T s =1/F s 内完成。因此,采样频率越低,控制器执行算
2.1 性能评价指标 法的时间余量就越大。综合上述因素,在信号的精
准采样和控制器计算冗余两者之间寻求平衡,将采
在 主 动 控 制 算 法 的 仿 真 中, NR( noise reduction) 样频率选择为 2 kHz。
值是常用的性能评价指标,其计算公式为: 在仿真中,设输出信号功率的约束值为 0.28 W,
( ( ) ( ))
2
2
NR = 10lg E d (n) /E e (n) (9) 由单频信号的峰值与功率的关系:
式中,NR 为误差控制量,体现的是控制前后误差信 A 2 max
E max = (12)
号功率的降低量。NR 越大,算法的控制效果越好。 2
x
然而 NR 在约束输出主动控制算法中具有片面性。 可知,TGD FxLMS 算法限制幅值 A ma 应设为 0.75 V。
对于 Leaky FxLMS 算法,多次仿真后发现当泄露因
这是因为约束输出算法的目的是在控制输出得到良
子 γ取为 1.02 时,可使得稳态输出功率保持在与 TGD
好约束的前提下尽可能地提升误差控制量 NR。因
此,NR 自身并不能作为衡量约束输出算法性能的唯 FxLMS 算法相同的 0.28 W。从而保证两种算法具有
一指标。 相同的约束功率。在此条件下,利用构建的性能指
为此,本文建立以下两个额外的性能评价指标, 标体系比较两种算法的性能。
以实现对约束输出算法的评价: 图 5 为 Leaky FxLMS 和 TGD FxLMS 算法的时域
NR 输出信号,图 6 为两种算法的时域输出信号功率变
NR = (10)
2
E(y (n)) 化曲线,图 7 为两种算法的时域误差信号,图 8 为两