
Page 214 - 《振动工程学报》2026年第5期
P. 214
1418 振 动 工 程 学 报 第 39 卷
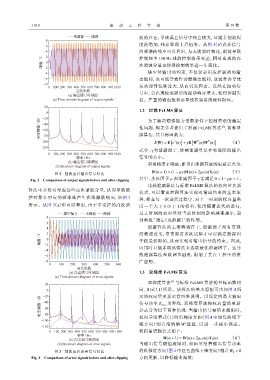
未削波 削波 波的存在,导致误差信号中残差较大,且随着削波程
8
度的增加,残差呈现上升趋势。从图 3(b)误差信号
6
4 2 的频谱曲线中可以看出,与未削波时相比,削波导致
幅值 / V −2 0 控制频率 160 Hz 处的控制效果变差,同时出现的高
次谐波分量也使得控制效果进一步恶化。
−4 缺少对输出的约束,不仅仅会引发控制器的输
−6 出饱和,也可能导致作动器输出饱和,这通常会导致
−8
0 100 200 300 400 500 600 700 800 900 1000 运动部件位移过大,从而引发撞击。反映在振动信
迭代次数 号中,会出现较宽频带的振动响应增大,使得控制失
(a) 输出信号时域图
(a) Time-domain diagram of output signals 稳。严重的输出饱和会导致控制系统硬件损坏。
20
1.2 泄露 FxLMS 算法
0
−20 为了解决硬件能力受限条件下控制算法的稳定
电压幅值 / dB −40 性问题,相关学者提出了泄露 FxLMS 算法 ,简称泄
[7]
−60
露算法,其目标函数为:
−80
(
−100 J(W) = E e (n) +γE W (n)W (n) ) (4)
(
)
T
2
T
−120
式中, γ为泄露因子,影响泄露算法在收敛阶段输出
0 100 200 300 400 500 600 700 800 900 1000
频率 / Hz 信号的大小。
(b) 输出信号频谱图 利用梯度下降法,推导出泄露算法的更新公式为:
(b) Spectrum diagram of output signals
图 2 削波前后输出信号对比 W(n+1) = (1−µγ)W(n)+2µe(n)X f (n) (5)
其中,步长因子 μ 和泄露因子 γ 需满足 0 < 1−µγ < 1。
Fig. 2 Comparison of output signals before and after clipping
比较泄露算法与标准 FxLMS 算法的权向量更新
算法中并没有考虑这些高次谐波分量,从而导致被
公式,可以看出泄露算法实现对输出约束的基本原
控对象在对应的频率处产生次级激励响应,如图 3 理,即在每一次迭代过程中,对上一时刻的权向量乘
所示。从图 3(a)中可以看出,由于不受控的高次谐 以一个大于 0 小于 1 的权重,使得随着迭代的进行,
期望信号 未削波 削波
过去时刻的权向量对当前时刻的影响越来越小,起
8
到类似“遗忘(或泄露)”的作用。
6
泄露算法的主要弊端在于,泄露因子没有直观
4
幅值 / V −2 2 0 的物理意义,常常需要多次试验才可以确定泄露因
子的最佳取值,从而实现对输出信号的约束。因此,
−4 应用时只能采取试错法来选取最优泄露因子。这导
−6 致泄露算法参数调节困难,限制了其在工程中的推
−8 广应用。
0 100 200 300 400 500 600
迭代次数
(a) 误差信号时域图 1.3 双梯度 FxLMS 算法
(a) Time-domain diagram of error signals
双梯度算法 [9] 与标准 FxLMS 算法的目标函数相
20
0 同,如式(1)所示。该算法的基本思想可由如图 4 所
−20 示的权向量更新示意图来说明。以设定的最大输出
电压幅值 / dB −40 信号功率 E ma 为界线,双梯度算法将权向量的更新
x
−60
公式分为以下两种情况:当输出信号幅值未超限时,
−80
−100 权向量沿着式(1)的负梯度方向(图 4 中绿色曲线下
∗
−120 降方向)朝着维纳解 W 逼近,以进一步减小误差。
0 100 200 300 400 500 600 700 800 900 1000 权向量更新公式如下:
频率 / Hz
(b) 误差信号频谱图 W(n+1) = W(n)+2µ 1 e(n)X f (n) (6)
(b) Spectrum diagram of error signals 当输出信号幅值超限时,权向量沿着输出信号功率
图 3 削波前后误差信号对比 的负梯度方向(图 4 中红色曲线下降方向)朝着 W 0 = 0
Fig. 3 Comparison of error signals before and after clipping 方向更新,以降低输出幅值: