
Page 62 - 《振动工程学报》2026年第3期
P. 62
662 振 动 工 程 学 报 第 39 卷
T
ú ú
ê ê éw p1 ù êê é v ( t ) ù ú ú 与 均 方 根 误 差 RMSE 来 衡 量 模 型 精 度 ,具 体 定 义
P [ v ]( t )= ê ú ê ê ê ê v ( t ú ú ) (12) 如下:
ú
2
ê ê êw p2 ú ú ê ê ú ú
3
ëw p3 û ë v ( t ) û N N
RE = ∑ ( y ͂ - y i ) 2 ∑ y i 2 (13)
i
计 算 得 到 PPI 模 型 及 其 逆 模 型 算 子 与 权 重 如 i = 1 i = 1
表 2 所示。 N
2
RMSE = ∑ ( y ͂ - y i ) /N (14)
i
i = 1
表 2 PPI 迟滞模型参数 式中, y ͂ 表示迟滞模型的预测输出; y i 表示试验测得
Tab. 2 Parameters of the PPI hysteresis model i
的实际输出。
编号 w r w ̂ w p
r
拟合精度对比情况如表 3 所示,PPI 模型相对
1 0.4578 2.2725 0.0087
PI 模型拟合迟滞环的均方根误差从 232.5 μm 降至
2 0.8597 −1.6097 0.0014
26.3 μm,相对误差从 11.82% 降至 2.09%,验证了本
3 0.0645 −0.0526 0.0042
4 0.0466 −0.0530 — 文所提 PPI 迟滞模型在描述柔性压电宏纤维致动器
5 0.4082 −0.0109 — 的非对称偏置迟滞特性时具有较高精度。
6 0.0264 −0.0879 — 表 3 PI 模型与 PPI 模型的拟合精度对比
7 1.1424 −0.0489 — Tab. 3 Comparison of fitting precision between the PI
8 23.0050 −0.0053 — model and PPI model
模型 RMSE/μm RE/%
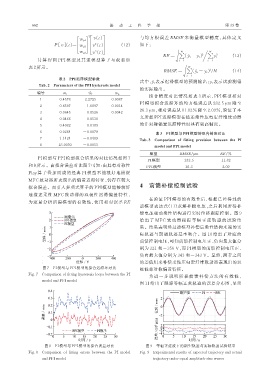
PI 模型与 PPI 模型拟合结果的对比情况如图 7
PI 模型 232.5 11.82
和 8 所示。由拟合误差对比图 7 可知:由具有对称性 PPI 模型 26.3 2.09
Play 算子叠加而成的经典 PI 模型不能很好地捕捉
MFC 致动器所表现出的偏置迟滞特征,仍存在较大
拟合误差。而引入多项式算子的 PPI 模型能够较好 4 前馈补偿控制试验
地描述柔性 MFC 致动器的双极性迟滞偏置特性,
在验证 PPI 模型的有效性后,根据已经得到的
为定量分析所提模型的有效性,使用相对误差 RE
逆模型表达式(11)求解补偿电压,之后利用所得补
偿电压驱动柔性结构进行实时位移跟踪控制。图 9
给 出 了 MFC 致 动 器 跟 踪 等 幅 正 弦 轨 迹 的 试 验 结
果。结果表明经过逆模型补偿后柔性结构末端的实
际轨迹与期望轨迹基本吻合。图 10 给出了对应的
前馈控制电压,可知前馈控制电压正、负向最大值分
别为 321 和-356 V,而 PI 模型的前馈控制电压正、
负向最大值分别为 343 和-343 V。显然,两者之间
的差值用来补偿柔性压电宏纤维致动器表现出的双
图 7 PI 模型与 PPI 模型的拟合迟滞环对比 极性非对称偏置特征。
Fig. 7 Comparison of fitting hysteresis loops between the PI
为 进 一 步 说 明 所 提 前 馈 补 偿 方 法 的 有 效 性 ,
model and PPI model
图 11 给出了跟踪等幅正弦轨迹的误差分布图,显示
图 8 PI 模型与 PPI 模型的拟合误差对比 图 9 等幅正弦波下的期望轨迹与实际轨迹试验结果
Fig. 8 Comparison of fitting errors between the PI model Fig. 9 Experimental results of expected trajectory and actual
and PPI model trajectory under equal-amplitude sine waves