
Page 18 - 《振动工程学报》2026年第3期
P. 18
618 振 动 工 程 学 报 第 39 卷
验测试系统验证理论建模的合理性。最后讨论连接 R y 为圆锥壳大半径和圆柱壳的半径, L 为圆锥壳母
o
处部分螺栓缺失对纤维增强锥⁃柱组合壳整体结构 线长度, L 为圆柱壳的长度,j 为圆锥壳半锥角的余
y
刚度的影响。 角(α 为半锥角),β 为圆锥壳的铺层角度,β 为圆柱
y
o
壳的铺层角度,h k 为第 k 层纤维的厚度,圆锥壳与圆
1 纤维增强锥‑柱组合壳固有特性的 柱壳的厚度相同,设为 h。锥⁃柱组合壳的参考面与
其中间面一致,在中间面上分别建立两个子结构的
理论求解
正交坐标系 ( x o,θ o,z o ) 和 ( x y,θ y,z y )。同时,平行纤
维方向设为 1,垂直纤维方向设为 2。G 12 为 1⁃2 平面
1. 1 模型假设
内的剪切模量, E 1 为 1 方向上的弹性模量, E 2 为 2 方
研 究 对 象 为 螺 栓 连 接 的 纤 维 增 强 复 合 薄 壁 向上的弹性模量, μ 1 为 1 方向引起 1⁃2 面内产生应变
锥⁃柱组合壳。在材料方面,由 N 层正交各向异性的 的泊松比, μ 2 为 2 方向引起 1⁃2 面内产生应变的泊松
纤维增强复合材料铺设而成。在结构方面,利用圆 比,ρ 为组合壳体的密度。在正交坐标系中,x、θ 和 z
锥壳和圆柱壳两个子结构通过螺栓连接组合而成, 分别表示轴向、周向和径向三个平移坐标轴,对应坐
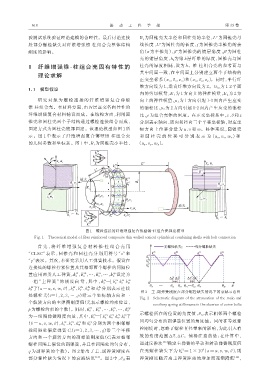
固定方式为圆柱壳底部固定。该理论模型如图 1 所 标方向上位移分量为 u、v 和 w。具体来说,圆锥壳
示。图 1 中表示了纤维增强复合薄壁锥⁃柱组合壳 和 圆 柱 壳 的 位 移 可 分 别 表 示 为 ( u o,v o,w o ) 和
的几何参数和坐标系。图 1 中,R 1 为圆锥壳小半径, ( u y,v y,w y )。
图 1 螺栓连接的纤维增强复合薄壁锥⁃柱组合壳理论模型
Fig. 1 Theoretical model of fiber⁃reinforced composite thin⁃walled conical⁃cylindrical⁃combining shells with bolt connection
首 先 ,将 纤 维 增 强 复 合 材 料 锥⁃柱 组 合 壳 用
“CLSC”表 示 ,圆 锥 壳 和 圆 柱 壳 分 别 用 符 号“o”和
“y”表示。其次,本研究采用人工弹簧技术。假设在
连接处的螺栓拧紧位置及其相邻两个螺栓的间隔位
Zi
Zp
置应用两类人工弹簧, k a , k a ,⋯, k a ,⋯, k a 设定为
Z2
Z1
Zi Zi Zi Zi
一 组“ 主 弹 簧 ”的 刚 度 向 量 ,其 中 , k a =[ k u k v k w
Zi
Zi
Zi
Zi
Zi
k θ ](a = u,v,w,θ), k u 、 k v 、 k w 和 k θ 分别表示连接
T
图 2 主、副弹簧刚度在部分螺栓缺失情况下的衰减示意图
处螺栓 Z i (i=1,2,3,…,p)沿三个坐标轴方向和一
Fig. 2 Schematic diagram of the attenuation of the main and
个旋转方向的主弹簧刚度值(Z i 表示螺栓约束位置,
auxiliary spring stiffnesses in the absence of some bolts
C1 C2 Ci Cq
p 为螺栓约束的个数)。同时, k b , k b ,⋯, k b ,⋯, k b
Ci Ci Ci Ci Ci T 示螺栓所在的位置的角度值, θ Ci 表示相邻两个螺栓
为一组副弹簧刚度向量,其中, k b =[ k u k v k w k θ ]
Ci
Ci
Ci
Ci
(b = u,v,w,θ), k u 、 k v 、 k w 和 k θ 分别为两个相邻螺 间均匀分布的副弹簧位置的角度值。同时在等效螺
栓间隔处假定弹簧 C i (i=1,2,3,⋯,q)沿三个平移 栓刚度时,忽略了螺栓直径带来的影响,为此引入有
方向和一个旋转方向的副弹簧刚度值(C i 表示相邻 效的角度范围 ΔZ、ΔC。值得注意的是:在计算中,
螺栓间隔上假设的副弹簧,并且在间隔处均匀分布, 通过反推法 [23] 确定主弹簧的平动和转动弹簧刚度值
Zi
9
q 为副弹簧的个数)。图 2 给出了主、副弹簧刚度在 在无螺栓缺失下为 k a = 1 × 10 ( a = u,v,w,θ ),副
部分螺栓缺失情况下的衰减情况 [11] 。图 2 中, θ Zi 表 弹簧刚度随着离主弹簧距离的增加而逐渐降低 [12] ,