
Page 14 - 《振动工程学报》2026年第3期
P. 14
614 振 动 工 程 学 报 第 39 卷
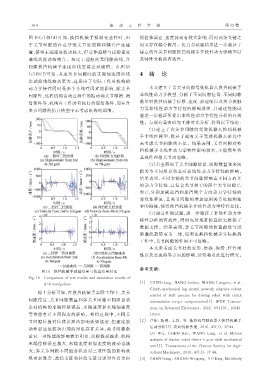
图 10(c)和(d)可知,换挡机械手操纵变速杆时,由 的位移误差、速度波动有较大影响,同时两条支链之
于关节间隙的存在导致关节处的轴和轴套产生碰 间又存在耦合作用。仿真与试验结果进一步验证了
撞,使得末端速度波动较大,但总体趋势与试验速度 建立的含关节间隙换挡机械手非线性动力学模型以
曲线的波动相吻合。相比于理想的无间隙曲线,含 及特性分析的有效性。
间隙换挡机械手速度曲线更接近试验值。由图 10
(e)和(f)可知,考虑关节间隙时的末端加速度曲线 4 结 论
比试验曲线波动更大,这是由于实际工作时机构的
动力学特性同时受多个非线性因素的影响,除关节 本文建立了含关节间隙驾驶机器人换挡机械手
间隙外,还有机构运动过程中的振动和关节摩擦、润 非线性动力学模型,分析了不同间隙位置、不同间隙
滑条件等,机构在工作时有较好的润滑条件,而在含 数量对换挡机械手位移、速度、加速度以及关节接触
力等非线性动力学特性的影响规律,并通过性能试
关节间隙的仿真模型中未考虑机构的润滑。
验进一步验证所提出非线性动力学特性分析的有效
性。与现有重要研究工作对比分析,得到以下结论:
(1)建立了含关节间隙的驾驶机器人换挡机械
手非线性模型,弥补了现有关于驾驶机器人研究中
未考虑关节间隙的不足。结果表明,关节间隙对换
挡机械手非线性动力学特性影响较大,不能简单将
其视作理想关节而忽略。
(2)着重研究了关节间隙位置、间隙数量和多间
隙关节不同组合状态对非线性动力学特性的影响。
结果表明,不同支链的关节间隙影响着不同方向上
的动力学特性,且复合关节处 C 的两个关节间隙 C 2
和 C 3 分别加剧选挡和挂挡两个方向动力学特性的
非线性程度,且关节间隙的增加加剧关节处轴和轴
套的碰撞,使得换挡机械手非线性动力学特性恶化。
(3)通过性能试验,进一步验证了非线性动力学
特性分析的有效性,同时也对现有仿真研究提供了
数据支撑。结果表明,含关节间隙的仿真曲线与试
验曲线趋势更为一致,说明在换挡机械手实际换挡
工作中,关节间隙的作用不可忽略。
本文未考虑关节处的变形、磨损、润滑,杆件柔
性以及变速器等方面的影响,后续将对此进行研究。
参考文献:
图 10 换挡机械手试验结果与仿真结果对比
Fig. 10 Comparison of test results and simulation results of
shift manipulator [1] CHEN Gang, JIANG Junhao, WANG Liangmo, et al.
Clutch mechanical leg neural network adaptive robust
综上分析可知,在换挡机械手实际工作中,关节
control of shift process for driving robot with clutch
间隙位置、关节间隙数量和多关节间隙不同组合状
transmission torque compensation[J]. IEEE Transac⁃
态对机构的末端位移误差、末端速度和末端加速度 tions on Industrial Electronics, 2022, 69(10): 10343-
等性能有着不同程度的影响。换挡过程中,不同关 10353.
节间隙位置对位移误差的影响效果接近,但速度波 [2] 卢伟, 陈浩, 王玲, 等 . 拖拉机驾驶机器人换挡机械手
动和加速度波动出现的时机存在差异;关节间隙数 运动分析[J]. 农业机械学报, 2016, 47(1): 37-44.
LU Wei, CHEN Hao, WANG Ling, et al. Motion
量对三项性能的影响效果明显,间隙数量越多,机构
analysis of tractor robot driver’s gear shift mechanical
末端位移误差越大,末端速度和加速度的波动也越
arm[J]. Transactions of the Chinese Society for Agri⁃
大;多关节间隙不同组合状态对三项性能的影响效 cultural Machinery, 2016, 47(1): 37-44.
果更加复杂,选挡支链和挂挡支链分别对各自方向 [3] CHEN Gang, ZHANG Weigong, YU Bing. Multibody