
Page 13 - 《振动工程学报》2026年第3期
P. 13
第 3 期 陈 刚,等: 驾驶机器人换挡机械手非线性动力学特性分析 613
试验标准不断控制车辆进行换挡操作。试验在国家 数据进行分析和处理。试验车物理参数和换挡机械
客车质量监督检验中心的 BOCO NJ150/80 底盘测 手传感器参数如表 3 所示。驾驶机器人安装在试验
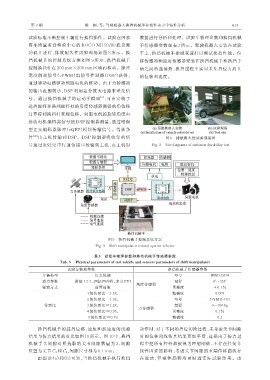
功机上进行,排放耐久性试验现场如图 8 所示。换 车上,换挡机械手操纵变速杆以测试换挡性能。位
挡机械手的控制系统方案如图 9 所示,换挡机械手 移传感器和速度传感器安装在换挡机械手和换挡手
控制换挡杆在 200 mm×200 mm 区域内移动。脉冲 柄之间的连接处,换挡过程中实时采集挡位方向上
宽度调制信号(ePWM)由信号控制器(DSP)获得, 的位移和速度。
通过驱动电路驱动伺服电机的移动。由于力传感器
的输出范围较小,DSP 利用差分放大电路来采集信
[9]
号。通过换挡机械手的运动学模型 ,可由安装于
选挡摇杆和换挡摇杆处的角度传感器测得的角位移
计算得到换挡杆末端位移。伺服电机的旋转角度由
接收电机编码器信号的 DSP 控制器测量,通过增强
型正交编码器脉冲(eQEP)模块传输信号。驾驶条
件 [20] 由主机传输到 DSP。DSP 控制器将收集的信 图 8 排放耐久性试验现场图
号通过 RS232 串行通信接口传输到主机,由主机对 Fig. 8 Site diagrams of emission durability test
图 9 换挡机械手控制系统方案
Fig. 9 Shift manipulator control system scheme
表 3 试验车物理参数和换挡机械手传感器参数
Tab. 3 Physical parameters of test vehicle and sensors parameters of shift manipulator
试验车物理参数 换挡机械手传感器参数
车辆类型 长安悦翔 型号 WDD35D4
动力参数 排量 1.5 L,四缸四冲程,多点 EFI 量程 0°~355°
角度传感器
驱动方式 前置前驱 灵敏度 ±0.1%
1 级传动比=3.58, 精确度 0.007
2 级传动比=1.92, 型号 DYMH-103
传动比 3 级传动比=1.28, 量程 0~100 kg
力传感器
4 级传动比=0.95, 灵敏度 0.3%
5 级传动比=0.76 精确度 0.3
换挡机械手的挂挡位移、速度和加速度的试验 动作时,对于不同的挡位切换过程,未考虑关节间隙
结果与仿真结果的对比如图 10 所示。图 10 中,换挡 时的位移曲线仿真结果更加平滑,这是由于仿真过
机械手含间隙对照选取的关节间隙数量为 2,间隙 程中把所有杆件都被视为理想刚体,不存在任何非
位置为关节 C 2 和 C 3,间隙尺寸都为 0.1 mm。 线性因素的影响,考虑关节间隙的末端位移曲线存
由图 10(a)和(b)可知,当换挡机械手执行换挡 在 波 动 ,但 整 体 趋 势 均 更 贴 近 实 际 试 验 结 果 。 由