
Page 12 - 《振动工程学报》2026年第3期
P. 12
612 振 动 工 程 学 报 第 39 卷
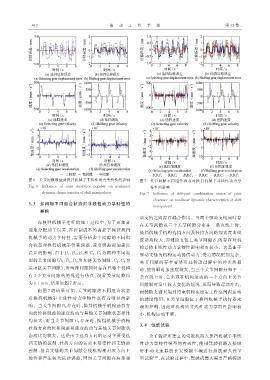
图 6 关节间隙数量对换挡机械手非线性动力学特性的影响 图 7 关节间隙不同组合状态对换挡机械手非线性动力学
Fig. 6 Influence of joint clearance number on nonlinear 特性的影响
dynamic characteristics of shift manipulator Fig. 7 Influence of different combination states of joint
clearance on nonlinear dynamic characteristics of shift
3. 3 多间隙不同组合状态对非线性动力学特性的
manipulator
影响
动支链之间存在耦合作用。当两个驱动支链同时存
在换挡机械手连杆的加工过程中,为了更加合
在关节间隙或三个关节间隙分布在一条直线上时,
理地分配加工误差,在控制成本的前提下保证换挡
换挡机械手机构选挡方向及挂挡方向的加速度曲线
机械手的动力学特性,需要分析多个间隙的不同组
波动均较大,而辅助支链上关节间隙 B 1 的存在对机
合状态对换挡机械手位移误差、速度误差和加速度
构总体非线性动力学特性影响相对较小。这是由于
误差的影响,由于 B 1、 B 2、 B 3 和 C 2、 C 3 为两种不同类 驱动支链为机构运动提供动力,受力情况更加复杂,
型的关节间隙(B 1、 B 2、 B 3 为支链关节间隙, C 2、 C 3 为 关节间隙的存在容易引起传动过程中的冲击和振
运动链关节间隙),对两种间隙同时存在且整个机构 动,使得瞬时加速度较大,当三个关节间隙分布于一
有 3 个关节间隙的情况进行仿真,设置关节间隙均 条直线上时,会出现在机构运动的一个方向上关节
为 0.1 mm,结果如图 7 所示。 间隙瞬时发生较大变化的情况,从而导致运动冲击,
由图 7 的结果可知,关节间隙的不同组合状态 而辅助支链只起到约束机构在给定工作空间内运动
对换挡机械手非线性动力学特性也有着明显的影 的辅助作用,且关节间隙位于换挡机械手执行器末
响。当关节间隙 B 2 存在时,换挡机械手机构选挡方 端的异侧,因此对机构的非线性动力学特性影响较
向的位移误差和速度波动与其他关节间隙状态相比 小,机构运动平顺。
均较大;而当关节间隙 B 3 存在时,换挡机械手机构
3. 4 性能试验
挂挡方向的位移误差和速度波动与其他关节间隙状
态相比均较大。这是由于选挡方向的运动主要受选 为了验证所建立的驾驶机器人换挡机械手非线
挡支链的控制,挂挡方向的运动主要受挂挡支链的 性动力学特性模型的有效性,使用驾驶机器人操纵
控制,各自支链的关节间隙会使机构相对应方向上 带手动变速器的长安悦翔车辆进行排放耐久性 V
的位移产生较大运动误差,同时关节间隙在两条驱 型试验 [20] ,在试验过程中,驾驶机器人需要严格按照