
Page 7 - 《振动工程学报》2026年第3期
P. 7
第 3 期 陈 刚,等: 驾驶机器人换挡机械手非线性动力学特性分析 607
c = R i - R j (1)
如图 3(c)所示,机构在运动时,定义轴的中心
与轴套中心距离为 c′,假设连杆 ij 的杆长为 l, L e 即为
连杆 j 在运动学分析时的有效长度,其计算公式为:
2
L e = ( l + x j ) + y j 2 (2)
式中, x j 与 y j 为轴套中心在轴中心局部坐标系中的
位置坐标。
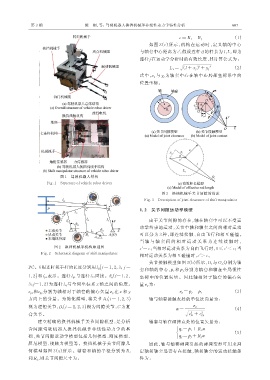
图 1 驾驶机器人结构
Fig. 1 Structure of vehicle robot driver
图 3 换挡机械手关节间隙的描述
Fig. 3 Description of joint clearance of shift manipulator
1. 2 关节间隙运动学模型
由于关节间隙的存在,轴在轴套中可以不受运
动学约束地运动,关节中轴和轴套之间的相对运动
可以分为 3 种,即连续接触、自由飞行和相互碰撞。
当 轴 与 轴 套 间 的 相 对 运 动 关 系 为 连 续 接 触 时 ,
图 2 换挡机械手机构原理图 c′= c;当相对运动关系为自由飞行时, 0 ≤ c′< c;当
Fig. 2 Schematic diagram of shift manipulator
相对运动关系为相互碰撞时, c′> c。
关节接触模型如图 3(b)所示, O i 与 O j 分别为轴
PC。6 根连杆和手杆的长度分别用 l ij( i = 1,2,3;j =
套和轴的中心, p i 和 p j 分别为轴套和轴在全局惯性
1,2) 和 l pc 表示。连杆 l pc 与连杆 l 12 固接。θ ij (i=1,2, 坐标中的位置矢量。因此轴相对于轴套的偏心矢
3;j=1,2)为连杆 l ij 与全局坐标系 x 轴之间的角度。 量 e p 为:
e px 和e py 分别为轴相对于轴套的偏心矢量 e p 在 x 和 y e p = p j - p i (3)
方向上的分量。为简化模型,将关节 A i(i = 1,2,3) 轴与轴套接触点处的单位法向量为:
视为理想关节, B i(i = 1,2,3) 视为间隙关节, C 为复 e p
n = (4)
2
2
合关节。 e px + e py
建立精确的换挡机械手关节间隙模型,是分析 轴套与轴在碰撞点处的位置矢量为:
含间隙驾驶机器人换挡机械手非线性动力学的基 ìq i = p i + R i n
í (5)
础,关节间隙运动学模型包括几何模型、刚度模型、 î q j = p j + R j n
阻尼模型、接触力模型等。换挡机械手关节间隙几 因此,轴与轴套碰撞引起的碰撞变形可用来判
何模型如图 3(a)所示。轴套和轴的半径分别为 R i 定轴和轴套是否存在接触,轴和轴套的运动接触条
和 R j,则关节间隙尺寸为: 件为: