
Page 140 - 《振动工程学报》2026年第3期
P. 140
740 振 动 工 程 学 报 第 39 卷
1090 r/min 产生。第 4、6 和 7 阶谐波激发的振动在 依据图 16,结合对行星轮系啮合频率的分析,
430、936 和 1740 Hz 处出现了峰值,对应系统的第 4、 可以发现:减速器壳体与电机壳体测点处,振动加速
10 和 16 阶固有频率。 度峰值频率主要对应行星轮系高速级或低速级齿轮
副啮合频率,即基频及其倍频,如表 4 所示。这说明
5 动力总成稳态工况响应分析 壳体的振动主要来自齿轮副传递误差引起的动态啮
合力。
本节选择额定工况(1000 N‧m,1146 r/min),对 表 4 振动响应频率分布
电动轮动力总成在三种激励下的振动响应进行分 Tab. 4 Vibration response frequencies
析。首先,对由二维电磁场有限元模型获取的二维 动力总成壳体 高速级齿轮 低速级齿轮
电磁力进行载荷拉伸以获得三维电磁力。然后,计 振动频率/Hz 副啮合频率/Hz 副啮合频率/Hz
算电机转矩脉动和减速器齿轮啮合传递误差激励对 257 — 261.6(1 阶)
533 533.6(1 阶) —
应轴承处的动态力。最后,将三维电磁力和轴承动
800 — 784.8(3 阶)
态力分别施加到电机定子齿部以及总成轴承处的
1106 1067.2(2 阶) 1046.4(4 阶)
RBE2 节 点 上 ,实 现 系 统 多 源 载 荷 的 施 加 ,如 图 15
1383 — 1308(5 阶)
所示。 2011 2134.4(4 阶) —
2422 — 2354.4(9 阶)
2529 2668.2(5 阶) —
2818 — 2877.6(11 阶)
6 电动轮动力总成振动试验
为进一步验证仿真的准确性,并理解电动轮动
图 15 系统多源载荷施加
力总成的振动特性,对电动轮进行振动台架试验。
Fig. 15 Application of multi-source loads to the system
试验系统构成和试验现场分别如图 17 和 18 所示。
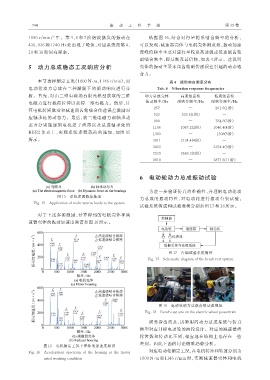
对于上述多源激励,计算得到的电机壳体和减
速器壳体的振动加速度频谱如图 16 所示。
图 17 台架试验系统简图
Fig. 17 Schematic diagram of the bench test system
图 18 电动轮动力总成台架试验现场
Fig. 18 Bench test site on the electric wheel powertrain
需要指出的是,试验用的动力总成系统与仿真
模型对应目标电动轮的两轮设计。对应的减速器齿
轮齿数和传动比不同,相应地在结构上也存在一些
差别。因此下面的讨论侧重趋势分析。
图 16 电机额定工况下壳体的加速度频谱
对应电动轮额定工况,在电机转矩和转速分别为
Fig. 16 Acceleration spectrum of the housing at the motor
rated working condition 1000 N‧m和 1146 r/min 时,实测减速器壳体和电机