
Page 63 - 《振动工程学报》2026年第2期
P. 63
第 2 期 李 玲,等:螺栓连接接触界面的不确定性参数辨识 379
式中,在上梁中 q=h/2;下梁中 q=−h/2;k A =EA/L;k 1 =EI/
3
L ; L 为 离 散 后 梁 单 元 节 点 长 度 ; h 为 梁 截 面 的 高
度。E、A 和 I 分别为杨氏模量、截面面积和弯曲惯量。 A B C D
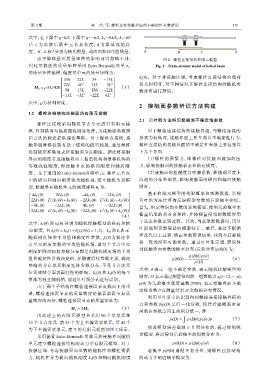
由于偏移量对质量矩阵的影响可以忽略不计, 图 2 螺栓连接梁的有限元模型
因此梁截面的质量矩阵采用 Euler-Bernoulli 梁单元 Fig. 2 Finite element model of bolted beam
的质量矩阵建模,偏置梁单元的质量矩阵为:
k 2 (θ)。对于非接触区域,考虑螺栓连接结构的载荷
156 22L 54 −13L
2 和几何特征,对不同情况下螺栓连接结构的随机参
22L 4L 13L 2
−3L (3)
M b = ρAL/420
54 13L 156
−22L 数分布进行辨识。
2 2
−13L −3L −22L 4L
式中, ρ为材料密度。
2 接 触 面 参 数 辨 识 方 法 构 建
1.2 螺栓连接结构连接段的有限元建模
2.1 贝叶斯方法辨识接触面不确定性参数
螺栓连接段采用随机节点单元进行有限元建
模,得到横向与轴向随机刚度矩阵,为接触面参数辨 对于螺栓连接结构的接触界面,当螺栓连接的
识方法的构建提供理论基础。对于螺栓连接段,接 预紧力较低时,接触界面主要呈现出不确定性行为,
触界面滑移机制有助于结构的能量耗散,通过滑移 螺栓连接结构接触界面的不确定性参数主要包括以
机制能更准确地表征接触面节点刚度。据此将接触 下几个方面:
界面的刚度看成接触界面上拍击机构和滑移机构的 (1)螺栓的预紧力,即螺栓对接触面施加的压
等 效 线 性 刚 度, 即 接 触 节 点 的 横 向 刚 度 和 轴 向 刚 力,影响接触面的接触状态和横向刚度。
度。基于通用的 Euler-Bernoulli 梁单元,将单元节点 (2)接触面的粗糙度与摩擦系数,即微观尺度上
中的横向和轴向刚度视为随机场,建立随机节点模 凸起的分布和形状,影响接触面的横向和轴向接触
型,接触界面随机单元的刚度矩阵 k j 为: 刚度。
基于有限元模型的先验概率和观测数据,采用
4k 1 (θ) 2Lk 1 (θ) −4k 1 (θ) 2Lk 1 (θ)
2 2
贝叶斯方法计算待反演模型参数的后验概率密度。
2Lk 1 (θ) L (k 1 (θ)+k 2 (θ)) −2Lk 1 (θ) L (k 1 (θ)−k 2 (θ))
−4k 1 (θ) −2Lk 1 (θ) 4k 1 (θ) −2Lk 1 (θ)
首先,给定待识别参数的系统模型,使用先验概率来
2 2
2Lk 1 (θ) L (k 1 (θ)−k 2 (θ)) −2Lk 1 (θ) L (k 1 (θ)+k 2 (θ))
(4) 衡量结果的相对合理性,并将测量得到的数据应用
于动态参数识别过程。其次,当获取新数据时,用贝
式中,k 1 (θ) 和 k 2 (θ) 分别为随机接触模型的横向和轴
叶斯规则更新假设的概率估计。最后,通过不断循
向 刚 度, 且 k i (θ) = k i0 (1+ε i f i (θ))(i = 1,2), k i 和 表 示
0
ε i
随机刚度场的平均值和确定性常数, f i (θ)为描述节 环迭代以上过程,修正参数辨识结果,找到与目标数
据一致的所有可能参数。通过贝叶斯定理,辨识得
点单元刚度参数的零均值随机场,即每个节点单元
到接触界面参数的概率分布 (后验分布)p(θ|D) 为:
刚度矩阵的初始参数分布都是由随机刚度场的平均
p(D|θ) p(θ)
值和确定性常数决定的,并随着后续参数更新,确定 p(θ|D) = (6)
p(D)
准确的节点单元刚度矩阵参数分布,不受节点单元
式中,θ 表示一组不确定参数,表示随机接触模型的
位置或结合面表面特性的影响。k 1 (θ) 和 k 2 (θ) 的每个
刚度;D 表示通过测量得到的一组数据点 x i (i=1,2,…,n);
值都为独立随机值,通过贝叶斯公式进行识别。
p(θ) 为先验概率密度函数 (PDF),表示接触界面不确
由于两个子结构在螺栓连接段节点截面上的重
定性参数 θ 在测量结果 D 之前的分布情况。
叠,螺栓连接段节点的质量效应是偏置梁段节点质
利用贝叶斯方法识别得到螺栓连接接触界面的
量效应的两倍,螺栓连接段节点的质量矩阵为:
真实参数 θ/p(D) 是归一化常数,使得后验概率密度
(5)
函数在参数空间上的积分统一,即
M j = 2M b
由此建立的有限元模型共采用 90 个梁单元和 w
p(D) = p(D|θ) p(θ)dθ (7)
10 个节点单元,前 45 个为上半偏置梁单元,后 45 个
假设模型误差是独立且同分布的,通过使用统
为下半偏置梁单元,建立的有限元模型如图 2 所示。
计模型,辨识得到后验概率的似然分布为:
采用偏置 Euler-Bernoulli 梁单元和接触界面随机
单元建立螺栓连接结构的动力学有限元模型, 对于 p(θ|D) ∝ p(D|θ) p(θ) (8)
接触区域,考虑接触界面参数的随机性和螺栓预紧 若概率 p(θ|D) 遵循正态分布,则螺栓连接结构
力,随机性分为横向随机刚度 k 1 (θ) 和轴向随机刚度 的动力学响应概率模型为: