
Page 236 - 《振动工程学报》2026年第2期
P. 236
552 振 动 工 程 学 报 第 39 卷
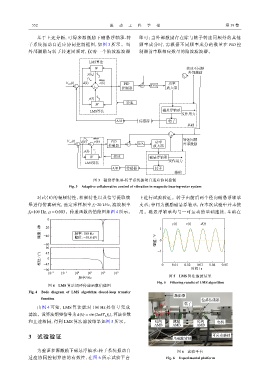
基于上述分析,可得多源激励下磁悬浮轴承-转 即可;当外部激励存在除与转子转速同频外的其他
子系统振动自适应协同控制框图,如图 3 所示。当 频率成分时,需根据不同频率成分的数量在 PID 控
外部激励与转子转速同频时,仅需一个陷波滤波器 制器前串联相应数量的陷波滤波器。
LMS算法
W 转速不同频
外部激励
y(k b )
+
+
U ref (t) d(k) − e(k) PID 功率
+ − + − 控制器 + + D/A 放大器
y(k)
转速
W
LMS算法 磁悬浮轴承
反作用力
A/D 传感器 转子
基础
+ +
转速同频
U ref (t) d(k) e(k) PID 功率
+ − + − 控制器 + + D/A 放大器 外部激励
y(k)
W 转速 磁悬浮轴承
反作用力
LMS算法
A/D 传感器 转子
基础
图 3 磁悬浮轴承-转子系统振动自适应协同控制
Fig. 3 Adaptive collaborative control of vibration in magnetic bearing-rotor system
对式(8)的幅频特性,相频特性以及信号提取效 上进行试验验证。转子由前后两个径向磁悬浮轴承
果进行仿真研究,选定采样频率 f s =20 kHz,滤波频率 支承;中间为激励磁悬浮轴承,在本次试验中并未使
f 0 =100 Hz, µ = 0.003。传递函数的伯德图如图 4 所示。 用。磁悬浮轴承均与一可运动的基础连接,基础在
0
y(t) e(t) d(t)
幅值 / dB −40 频率: 100 Hz 1
−20
幅值: −50.8 dB
−60 幅值 / V 0
90 −1
45
相位 / (°) −45 0
0.03
−90 0 0.01 0.02 时间 / s 0.04 0.05
10 −2 10 −1 10 0 10 1 10 2 10 3
频率/ Hz 图 5 LMS 算法滤波结果
Fig. 5 Filtering results of LMS algorithm
图 4 LMS 算法闭环传递函数伯德图
Fig. 4 Bode diagram of LMS algorithm closed-loop transfer
激振器
function
位移传感器
Z 转子
由图 4 可知,LMS 算法能对 100 Hz 处信号完成
Y
滤波。设算法期望信号为 d(k) = sin(2πkT s f 0 ),算法参数 X O
和上述相同,得到 LMS 算法滤波结果如图 5 所示。 径向 激励 径向 电机
AMB AMB AMB
3 试 验 验 证 基础旋转轴 可运动基础
为验证多源激励下磁悬浮轴承-转子系统振动自 图 6 试验平台
适应协同控制算法的有效性,在图 6 所示试验平台 Fig. 6 Experimental platform