
Page 235 - 《振动工程学报》2026年第2期
P. 235
第 2 期 杨天舒,等:多源激励下磁悬浮轴承-转子系统振动协同控制研究 551
[ ]
0 [ ]
由于磁悬浮轴承径向和轴向采用分散控制,相 −1 , C = E 0 , D = 0, 则 可 得 基 础 支 承
M K a 16×8 8×16
互独立,不存在耦合。因此微分方程组可以解耦为 条件下磁悬浮轴承的状态空间模型,如下式所示:
径向的四自由度微分方程组和轴向的单自由度微分
˙
ξ = Aξ + Bu
方程组。此处为简化模型,并未给出轴向磁悬浮轴 (5)
= Cξ + Du
承运动微分方程。 y
令
[ ] T
x 8 , 2 多 源 激 励 下 磁 悬 浮 轴 承 - 转 子 系 统
η = x 1 x 2 x 3 x 4 x 5 x 6 x 7
[ ] T
sin(ωt) cos(ωt) (2) 振 动 自 适 应 协 同 控 制
u = i 1 i 2 i 3 i 4 x 0 ˙ x 0
式中, ω为角速度。
则式(1)可写成矩阵形式: 为了消除不平衡力、基础运动以及外界扰动产
M ¨ η = C r ˙ η+ K r η+ K a u (3) 生的振动信号,本文在 PID 控制器前串联 LMS 不平
式中, 衡控制和基础运动自适应陷波滤波器组成振动协同
控制。
m 1
[ ] T
m 2
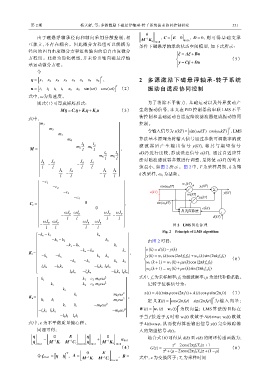
令输入信号为 x(kT)= sin(ω 0 kT) cos(ω 0 kT) ,LMS
m 3
算法基本原理为将输入信号通过参数可调数字陷波
m 4
l b l a
滤 波 器 后 产 生 输 出 信 号 y(kT), 将 其 与 期 望 信 号
m 6 m 6
,
M = l l
d(kT) 进行比较,形成误差信号 e(kT), 通过自适应算
l b l a
m 6 m 6
l
l 法对陷波滤波器参数进行调整,最终使 e(kT) 的均方
J d J d J d J d
− −
l l l l 值最小,如图 2 所示。图 2 中,T 为采样周期,k 为第
J d J d J d J d
− − k 次采样,ω 0 为基频。
l l l l
−c 1
w 1 (kT)
cos(ω 0 kT) y 1 (kT)
−c 2 ∑
x(kT) y(kT)
−c 3
w 2 (kT)
y 2 (kT)
−c 4
0 sin(ω 0 kT)
C r = ,
0 e(kT)
−
自适应算法
+
ωJ p ωJ p ωJ p ωJ p
− −
d(kT)
l l l l
ωJ p ωJ p ωJ p ωJ p
− − 图 2 LMS 算法原理
l l l l
Fig. 2 Principle of LMS algorithm
−k x −k 1 k x
−k x −k 2 k x 由图 2 可得:
−k x −k 3 k x
e(k) = d(k)−y(k)
−k x −k 4 k x
,
K r =
y(k) = w 1 (k)cos(2πk f s f 0 )+w 2 (k)sin(2πk f s f 0 )
−k x −k x k x k x
(6)
−k x −k x k x
k x w 1 (k +1) = w 1 (k)+µe(k)cos(2πk f s f 0 )
l a k x −l b k x −l a k x l b k x
w 2 (k +1) = w 2 (k)+µe(k)sin(2πk f s f 0 )
l b k x −l a k x −l b k x l a k x
2 式中, f s 为采样频率;f 0 为滤波频率;μ 为迭代补偿系数。
k i k 1 c 1 m 6 eω
2
c 2 m 6 eω 记转子位移信号为:
k i k 2
k i
x(t) = A(t)sinφcos(2πft)+ A(t)cosφsin(2πft) (7)
2
k i m 6 eω
K a = 2 。 [ ] T
k i k i m 6 eω 定 义 X(t) = cos(2πf 0 t) sin(2πf 0 t) 为 输 入 向 量 ;
2
−m 6 eω
k i k i [ ] T
W (t) = w 1 (t) w 2 (t) 为权向量; LMS 算法的目标在
2
−m 6 eω
−l a k i l b k i
于当 f 接近于 f 0 时有 w 1 (t) 收敛于 A(t)sinφ;w 2 (t) 收敛
−l b k i l a k i
式中,e 为不平衡质量偏心距。 于 A(t)cosφ,从而使得算法输出信号 y(t) 完全跟踪输
同理可得: 入的期望信号 d(t)。
[ ] [ ] [ ] [ ]
˙ η 0 E η 0 结合式(6)可得从 d(k) 至 e(k) 的闭环传递函数为:
= + u 8×1
−1
−1
¨ η M K r M C r ˙ η M K a
−1
2
16×1 16×16 16×1 16×8 z −2cos(2πf 0 T s )z+1
(4) G(z) = (8)
2
[ ] z +(µ−2)cos(2πf 0 T s )z+(1−µ)
[ ] T 0 E
令 ξ 16×1 = η ˙ η , A = −1 −1 , B = 式中,z 为变换因子;T s 为采样时间
M K r M C r
16×16