
Page 234 - 《振动工程学报》2026年第2期
P. 234
550 振 动 工 程 学 报 第 39 卷
平衡补偿控制,可以适用于转速变化的场合;文献 [12] 为此,本文在国内外学者研究的基础上,针对上述问
采用改进的自适应陷波滤波器抑制磁悬浮转子的同 题,通过建立多源激励下磁悬浮轴承-转子系统的动
步振动,同时估计工作频率,消除同步控制电流,并 力学模型,研究多源激励下磁悬浮轴承-转子系统振动
通过调节补偿相位保持闭环系统稳定性;文献 [13] 自适应协同控制,并搭建试验平台验证算法的有效性。
提出改进的双通道陷波滤波器,基于电流和位移信
号计算等效振动力矩,消除转子系统中的同步振动 1 多 源 激 励 - 磁 悬 浮 轴 承 - 转 子 系 统
力矩。 动 力 学 建 模
同时,部分学者也研究了基础运动下磁悬浮转
子的振动抑制。文献 [14] 对考虑基座平移和旋转运
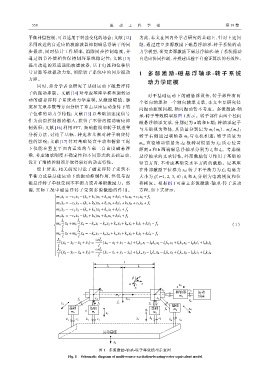
对于基础运动下的磁悬浮设备,转子部件有两
动的磁悬浮转子系统动力学建模,从激励幅值、脉
个径向轴承和一个轴向轴承支承,本文主要研究径
宽和支承参数等方面分析了冲击基座运动条件下转
向振动控制问题,轴向振动暂不考虑。多源激励-轴
子位移的动力学特性;文献 [15] 以基础加速度信号
承-转子等效模型如图 1 所示。转子部件由两个径向
作为前馈控制器的输入,获得了不错的振动响应抑 磁悬浮轴承支承,分别记为 a 端和 b 端;将轴承定子
制效果;文献 [16] 利用 FFT、频响曲线和转子轨道等 与基础视为整体,其质量分别记为 m 1 (m 3 )、m 2 (m 4 );
分析方法,讨论了基幅、转速和基频对转子响应特 转 子 右 侧 通 过 联 轴器 m 5 与 电 机 相 连 ; 转 子 质 量 为
性的影响;文献 [17] 针对基础竖直平动和俯仰工况 m 6 ,直径转动惯量为 J d ;极转动惯量为 J p ;质心位置
下仅能在竖直平面内运动的车载二自由度磁悬浮 距离 a 和 b 两端磁悬浮轴承分别为 l a 和 l b 。考虑磁
梁,考虑轴承刚度不确定性和不同形式的基础运动, 悬浮轴承的支承特性,外部激励信号作用于基础的
设计了滑模控制器并取得较好的动态特性。 竖直方向,不考虑基础受水平方向的激励。记基座
综上所述,相关研究讨论了磁悬浮转子受到不 在外部激励下位移为 x 0 ;转子不平衡力为 f e ;电磁力
平衡力或是基础运动下的振动抑制作用,但仅考虑 大小为 f i (i=1,2,3,4);k i 和 k x 分别为电流刚度和位
磁悬浮转子单独受到不平衡力或者基础激励力。然 移刚度。根据图 1 可建立多源激励-轴承-转子运动
而,实际工况中磁悬浮转子受到多源激励的作用。 方程,如下式所示:
m 1 ¨x 1 = −c 1 ˙x 1 −(k x +k 1 )x 1 +k x x 5 +k i i 1 +k 1 x 0 +c 1 ˙x 0 + f e
m 2 ¨x 2 = −c 2 ˙x 2 −(k x +k 2 )x 2 +k x x 6 +k i i 2 +k 2 x 0 +c 2 ˙x 0 + f e
m 3 ¨x 3 = −c 3 ˙x 3 −(k x +k 3 )x 3 +k x x 7 +k i i 3 + f e
m 4 ¨x 4 = −c 4 ˙x 4 −(k x +k 4 )x 4 +k x x 8 +k i i 4 + f e
l b l a
¨ ¨
m 6 x 5 +m 6 x 6 = −k x x 1 −k x x 2 +k x x 5 +k x x 6 +k i i 1 +k i i 2 − f e (1)
l l
l b l a
¨ ¨
m 6 x 7 +m 6 x 8 = −k x x 3 −k x x 4 +k x x 7 +k x x 8 +k i i 3 +k i i 4 − f e
l l
J d ωJ p
(¨x 6 − ¨x 5 − ¨x 2 + ¨x 1 ) =
(˙x 4 − ˙x 3 + ˙x 7 − ˙x 8 )+l a k x x 1 −l b k x x 2 −l a k x x 5 +l b k x x 6 −l a k i i 1 +l b k i i 2
l l
J d ωJ p
(¨x 8 − ¨x 7 − ¨x 4 + ¨x 3 ) =
(˙x 2 − ˙x 1 + ˙x 5 − ˙x 6 )+l b k x x 3 −l a k x x 4 −l b k x x 7 +l a k x x 8 −l b k i i 3 +l a k i i 4
l l
l
l a l b
β y
α z
x 9
x
联轴器 运动
x 7 x 8 c 6
m 6
m 5 基座
x 6
x 5
f 3 x 10
k 6
f e
x 3 f 1 f 2 基础
基础 基础 基础 x 4
a b f 4 m 4
m 3 m 1
m 2
x 1
x 2 k 2 c 2
k 3 c 3 k 1 c 1 k 4 c 4
运动基座
x 0
图 1 多源激励-轴承-转子等效模型示意图
Fig. 1 Schematic diagram of multi-source excitation-bearing-rotor equivalent model