
Page 174 - 《振动工程学报》2025年第9期
P. 174
2104 振 动 工 程 学 报 第 38 卷
350
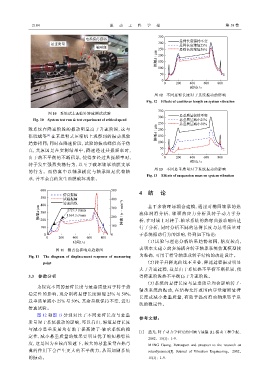
电涡流传感器 悬臂长度保持不变
悬垂质量 300 悬臂长度缩短25%
轴承座 悬臂长度缩短50%
振幅A / μm 250
200
150
100
50
0
0 200 400 600 800
时间t / s
图 12 不同悬臂长度对于系统振动的影响
Fig. 12 Effects of cantilever length on system vibration
350
图 10 系统试车&临界转速测试试验
300 悬垂质量保持不变
Fig. 10 System test run & test experiment of critical speed 悬垂质量减小25%
振幅A / μm 250
悬垂质量减小50%
致系统在降速阶段的振动明显高于升速阶段,这与 200
张晓斌等 [3] 在某悬臂式压缩机上观察到的振动现象 150
趋势相同;同时在降速阶段,试验的振动峰值高于仿 100
真,其原因是在实测结果中,降速经过共振频率时, 50
0
由于热不平衡的不断积累,使得在经过共振频率时, 0 200 400 600 800
时间t / s
转子发生强烈失稳行为,以至于破坏轴承油膜支承
图 13 不同悬垂质量对于系统振动的影响
的行为。而仿真中以轴承刚度与轴承阻尼代替轴
Fig. 13 Effects of suspension mass on system vibration
承,并不会真的发生油膜破坏现象。
600 500
仿真振幅 4 结 论
500
试验振幅 400
转速曲线
400 300 基于多物理场耦合建模,通过对椭圆轴承的热
振幅A/μm 300 1364.3 r/mim 200 转速 / (r·min −1 ) 流体润滑分析、轴颈热应力分析及转子动力学分
2727.3 r/min
析,在时域上对转子-轴承系统的热弯曲振动响应进
200
100 100 行了分析,同时分析不同的悬臂长度与悬垂质量对
0 0 于系统振动行为的影响,得到如下结论:
0 200 400 600 800
时间t / s (1)试验与理论分析结果趋势相同,精度较高,
表明本文建立的多场耦合转子轴承系统仿真模型较
图 11 测点位移响应趋势图
为准确,可用于指导轴承或转子结构的改进设计。
Fig. 11 The diagram of displacement response of measuring
point (2)转子升降速曲线不重叠,降速过程振动明显
大于升速过程,这是由于系统热不平衡不断积累,使
3.3 参数分析 得降速阶段热不平衡高于升速阶段。
(3)系统的悬臂长度与悬垂质量均会影响转子-
为探究不同的悬臂长度与悬垂质量对于转子热
轴承系统的振动,在结构允许范围内尽量缩短悬臂
稳定性的影响,现分别将悬臂长度缩短 25% 与 50%,
长度或减小悬垂质量,有助于提高滑动轴承转子系
悬垂质量减小 25% 与 50%,其余参数保持不变,进行
统的稳定性。
仿真试验。
图 12 和图 13 分别对比了不同悬臂长度与悬垂
参考文献:
质量对于系统振动的影响,可以看出,缩短悬臂长度
与减小悬垂质量均有助于提高转子-轴承系统的稳
[1] 孟光. 转子动力学研究的回顾与展望 [J]. 振动工程学报,
定性,减小悬垂质量的效果要明显优于缩短悬臂长
2002,15(1):1-9.
度,这是因为在较高转速下,较大的悬垂质量在热弯 MENG Guang. Retrospect and prospect to the research on
曲的作用下会产生更大的不平衡力,从而加剧系统 rotordynamics[J]. Journal of Vibration Engineering, 2002,
的振动。 15(1):1-9.