
Page 178 - 《振动工程学报》2025年第9期
P. 178
2108 振 动 工 程 学 报 第 38 卷
#
5 支点及阻尼器 式中,S p 为高低压转子的转速比;下标“H”和“L”分
#
低压涡轮盘 3 支点及阻尼器 #
高压压气机盘 2 支点及阻尼器 # 别表示高压转子和低压转子所对应的项; K br1 K br4 为
~
1 支点及阻尼器
低压风扇盘
对应维度的分块矩阵。
可见,双转子系统中,高压与低压转子间的振动
通过中介轴承耦合在一起,其他项中,高低压转子之
中介轴承
高压涡轮盘
间是独立的。
式 (1) 所示的模型只包括了转子系统的自由度,
因此只能得到转子系统本身的振动响应。为了对转
子支承结构的外传振动进行求解,必须将式 (1) 进行
图 2 电磁型主控式干摩擦阻尼器-双转子系统结构图
增广,使增广后的模型包含支承结构,也就是轴承座
Fig. 2 The structure of AMDFD-dual rotor system
的自由度。
#
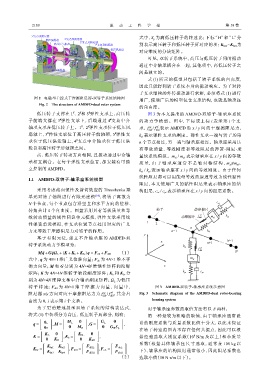
低压转子支撑在 1 、2 和 # 5 弹性支承上,高压转 图 3 为本文提出的 AMDFD-双转子-轴承座系统
#
子前端支撑在 3 弹性支承上,后端通过 4 支点中介 的动力学模型。图中,下标或上标 i 表示第 i 个支
#
#
轴承支承在低压转子上。1 、2 弹性支承位于低压风 承, f / f 表示 AMDFD 沿 x / y 向的干摩擦阻尼力,
#
#
yi
xi
dfd
dfd
#
扇轴上,3 弹性支承位于高压转子前轴颈,5 弹性支 k s 表示弹性支承的刚度。弹性支承一端与转子的第
#
i
#
承位于低压涡轮轴上,4 支点中介轴承位于低压涡 n 个节点相连,另一端与轴承座相连。轴承座采用具
轮盘和高压转子后轴颈之间。 有等效质量、等效刚度和等效阻尼的弹簧-阻尼-质
高、低压转子转动方向相同,且振动通过中介轴 量块系统模拟。m xi / m y 表示轴承座在 x / y 向的等效
i
承相互耦合。在每个弹性支承位置,都安装有可独 质 量, 由 于 轴 承 座 通 常 不 是 轴 对 称 结 构 , m xi ≠m yi 。
立控制的 AMDFD。 k xi / k y 表示轴承座在 x / y 向的等效刚度。由于任何
i
线性阻尼都可以用能量等效的原理等效为线性黏性
1.1 AMDFD-双转子-轴承座系统模型
阻尼,本文使用广义的黏性阻尼来表示轴承座的结
采用考虑截面惯性及剪切效应的 Timoshenko 梁 构阻尼,c xi / c y 表示轴承座在 x / y 向的阻尼系数。
i
单元对转子轴段进行有限元建模 [14] ,将转子离散为
N 个节点,每个节点包含沿竖直和水平方向的位移、 c xi
转角共计 4 个自由度。圆盘采用具有等效质量和等 转子 静摩擦片
xi
效转动惯量的刚性圆盘单元模拟,弹性支承采用线 动摩擦片 f dfd m xi k xi
性弹簧单元模拟,在支承位置节点处用对应的广义 1 2
n
力来等效干摩擦阻尼力对转子的作用。 n−1 k si
y
基于有限元法,建立不含轴承座的 AMDFD-双
x n+1 N−1
转子系统动力学模型为:
k si
yi
f dfd
(1) N
M ¨q+G ˙qΩ L +(K + K b + K br ) q = F ub + F dfd
o
式中,q 为 4N×1 维广义位移向量;F u 为 b 4N×1 维不平 m yi
衡力向量;M 和 G 分别为 4N×4N 维惯性矩阵和陀螺 z
矩阵;K 为 4N×4N 维转子轴段刚度矩阵;K b 和 K b 分 k yi c yi
r
别为 4N×4N 维弹支和中介轴承刚度矩阵;Ω L 为低压
转 子 转 速; F df 为 d 4N×1 维 干 摩 擦 力 向 量 , 向 量 中 , 图 3 AMDFD-双转子-轴承座系统示意图
yi
阻尼器 x/y 方向对应干摩擦阻尼力为 f /f ,其余自 Fig. 3 Schematic diagram of the AMDFD-dual rotor-bearing
xi
dfd dfd
由度为 0,i 表示第 i 个支承。 housing system
为了更清楚地展示双转子系统的结构表达式, 对于轴承座参数的取值方法有以下两种:
将式 (1) 中各项分为高压、低压转子两部分,则有: 第一种是较为粗略的取值,由于轴承座通常设
[ ] [ ] [ ]
0 0
q L M L G L 计的刚度系数与质量系数比值十分大,以此来保证
q = , M = ,G = ,
q H 0 M H 0 G H S p
在转子转速范围内不存在任何共振点,因此可以根
[ ] [ ]
0 0
K L K bL 8
K = , K b = , 据经验选取大刚度系数(10 N/m 及以上)和小质量
0 K H 0 K bH
系数(根据具体轴承座尺寸选取,通常在 以
[ ] [ ] [ ] 100 kg
K br1 K br2 F dfdL F ubL
K br = , F dfd = , F ub = 下),轴承座的结构阻尼通常很小,因此阻尼系数也
K br3 K br4 F dfdH F ubH
(2) 选取小值(10 N·s/m 以下)。