
Page 181 - 《振动工程学报》2025年第9期
P. 181
第 9 期 张 鹏,等:电磁型干摩擦阻尼器-双转子系统支承结构外传振动的主动控制 2111
节仅列出控制器的控制原理框图。 表 1 执行机构及摩擦副参数
仿真中,双转子系统的参数见文献 [11],轴向执 Tab. 1 Parameters of actuators and friction pairs
行机构以及摩擦副参数如表 1 所示。假设低压风扇 参数 数值
#
#
盘和低压涡轮盘的不平衡量的大小为 15 和 25 g·cm, 1 、3 支点执行器的磁极面积A 0 /mm 2 5320
#
#
高压风扇盘和高压涡轮盘的不平衡量的大小为 20 2 、5 支点执行器的磁极面积A 0 /mm 2 4640
和 40 g·cm,所有圆盘上的不平衡量初始相位均设为 0°。 电磁铁和推力盘之间的轴向气隙s 0 /mm 0.5
电磁执行器的线圈匝数 200
3.1 转速区间开关控制器 摩擦系数 0.3
摩擦副的切向刚度 2×10 7
基于转速区间开关控制器的控制框图如图 7 所
示。采用文献 [11] 中得到的各 AMDFD 最佳正压力组 速区间内开启控制器,在远离临界转速的位置关闭控
合,预设各个 AMDFD 电磁执行器的输入电流 i c 。使 制器。仿真中,控制器开启的低压转速区间分别设
用低压转速 Ω lo 作为触发开关,在临界转速附近的转 置为 950±100、1300±100、1900±150 和 2600±300 r/min。
w
各AMDFD最佳正压力组合
i c 正压力N t
转速触发开关 功率放大器 电磁执行器
不平衡力F ub
Ω low 摩擦力F dfd
转速传感器 双转子系统 摩擦副
电磁型主控式干摩擦阻尼器-双转子系统
轴承座振动q bs
振动速度传感器
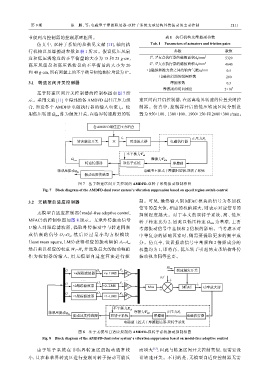
图 7 基于转速区间开关控制的 AMDFD-双转子系统振动抑制框图
Fig. 7 Block diagram of the AMDFD-dual rotor system’s vibration suppression based on speed region switch control
3.2 无模型自适应控制器 制。可见,最终输入到 MFAC 模块的信号为各加权
信号的最大值,相应的权值越大,则表示对应信号的
无模型自适应控制器(model-free adaptive control,
抑制程度越大。对于本文的双转子系统,高、低压
MFAC)的控制框图如图 8 所示。支承外传振动信号 转子转速比为 2,因此以低压转速 Ω lo 为基准,主要
w
U 输入到跟踪滤波器,提取外传振动中与转速同频 考虑振动信号中基频和 2 倍频的影响。当考虑不对
或 倍 频 的 信号 O 1 ~O n , 然 后 经 过 最 小 均 方 根 模 块 中等复杂的影响因素时,则需要提取更多的频率成
(least mean square, LMS)获得相应的振动幅值 A 1 ~A n , 分。仿真中,设置振动信号中基频和 2 倍频成分的
然后乘以相应的权重 W 1 ~W n 并选取最大的振动幅值 权重均为 1,即将高、低压转子引起的支承结构外传
作 为 控 制 器 的 输 入, 用 无 模 型 自 适 应 算 法 进 行 控 振动视为同等重要。
Ω low
U O n A n 转速触发开关
×n跟踪滤波器 ×n–LMS W n
ref
U O 2 A 2 i c
×2跟踪滤波器 ×2–LMS W 2 Max MFAC 功率放大器
U O 1 A 1
×1跟踪滤波器 ×1–LMS W 1
不平衡力F ub
摩擦力F
轴承座振动q bs dfd 正压力N t
振动速度传感器 双转子系统 摩擦副 电磁执行器
电磁型主控式干摩擦阻尼器-双转子系统
图 8 基于无模型自适应控制的 AMDFD-双转子系统振动抑制框图
Fig. 8 Block diagram of the AMDFD-dual rotor system’s vibration suppression based on model-free adaptive control
由于转子系统在非临界转速区的振动通常较 而增大 [12] ,因此与转速区间开关控制类似,也需要设
小,且在非临界转速区进行控制时转子振动可能反 计转速开关。不同的是,无模型自适应控制器无需