
Page 182 - 《振动工程学报》2025年第9期
P. 182
2112 振 动 工 程 学 报 第 38 卷
提前获知最佳正压力信息,能够在线对各个 AMDFD 界转速(2503 r/min)位置的支承外传振动降低最明
#
的正压力进行调控,以保证目标支承位置的外传振 显,在抑制效果最明显的 1 支点 X 向,开关控制和
动最小。根据图 6, 1 支点的振动在前 2 阶临界转速 MFAC 控制下该阶临界转速位置的支承外传振动分
#
处最为剧烈,因此本文以 1 支点竖直方向的外传振 别降低了 98% 和 52%,证明了 AMDFD 对支承结构
#
动作为目标点进行控制。 外传振动抑制的有效性。
为了研究 AMDFD 对支承结构外传振动的抑制
3.3 仿真结果及分析
机理,根据图 1 所示的 AMDFD 结构,对轴承座受到
利用 Simulink 搭建图 7 和 8 所示的控制回路模 的激励力进行分析,结果如图 10。在 AMDFD 作用
型,对 AMDFD-双转子系统的支承外传振动进行仿 之前,转子振动通过弹性支承传递给轴承座,轴承座
真, 得 到 控 制 前 后 各 个 支 承 的 外 传 振 动 速 度 如 受到的激励力等于支承位置的转子振动与支承刚度
图 9 所示。仿真中,转子系统的参数见文献 [11],竖 的乘积,为方便描述,这种方式传递的激励力称为弹
直 和 水 平 方 向 的 轴 承 座 刚 度 分 别 选取 1.5×10 和 支激励;在 AMDFD 作用之后,轴承座除了受到上述
8
8
1×10 N/m。 的弹支激励外,还有摩擦副传递的部分,由于静摩擦
片由轴承座进行限位约束,因此静摩擦片受到的摩
开关控制 MFAC控制 无控制 擦力会直接传递给轴承座,因此控制后轴承座所受
速度响应 / (mm·s −1 ) 4 2 0 0 1000 2000 3000 速度响应 / (mm·s −1 ) 2 1 0 0 1000 2000 3000 的激励力为弹支激励与摩擦副激励之和。虽然,使
用了
之后,轴承座受到了弹支激励和摩擦
AMDFD
副激励力,但由于阻尼的作用使弹性支承处的振动
−1
低压转速 / (r·min )
(a) 1 支点 X 向 −1 低压转速 / (r·min ) 明显降低,使得弹支激励力的减小幅度大于摩擦副
(b) 1 支点 Y 向
#
#
上的激励力,所以转子实际传递给轴承座的力减小,
#
#
(a) X direction of 1 support (b) Y direction of 1 support 从而使基座的振动降低。根据图 10,与 AMDFD 作
速度响应 / (mm·s −1 ) 1.5 0 速度响应 / (mm·s −1 ) 1.0 0 用前相比,AMDFD 作用后各个轴承座受到的激励力
幅值普遍降低,从而降低了各个支承的外传振动。
1.0
0.5
0.5
MFAC控制
开关控制
无控制
2000
3000
0
2000
1000
1000
−1
低压转速 / (r·min )
(d) 2 支点 Y 向
(c) 2 支点 X 向 −1 3000 0 低压转速 / (r·min )
#
#
(c) X direction of 2 support (d) Y direction of 2 support 支承所受激励 / N 1000 支承所受激励 / N 400
#
#
速度响应 / (mm·s −1 ) 1.5 0 速度响应 / (mm·s −1 ) 1.5 0 0 0 低压转速 / (r·min ) 0 0 低压转速 / (r·min )
500
200
3000
3000
2000
1000
1000
2000
1.0
1.0
−1
−1
(b) 2 支点
#
#
(a) 1 支点
0.5
0.5
(a) 1 support
#
#
(b) 2 support
3000
0
2000
1000
1000
2000
−1
低压转速 / (r·min )
(e) 3 支点 X 向 −1 3000 0 低压转速 / (r·min ) 1000 600
(f) 3 支点 Y 向
#
#
#
(e) X direction of 3 support (f) Y direction of 3 support 支承所受激励 / N 500 0 0 1000 2000 3000 支承所受激励 / N 300 0 0 1000 2000 3000
#
速度响应 / (mm·s −1 ) 2 1 0 速度响应 / (mm·s −1 ) 1.0 0 低压转速 / (r·min ) 低压转速 / (r·min )
−1
−1
#
#
(d) 4 支点
(c) 3 支点
(d) 4 support
(c) 3 support
#
#
0.5
图 10 支承所受的激励力
2000
3000
0
1000
1000
2000
−1
低压转速 / (r·min )
(g) 5 支点 X 向 −1 3000 0 低压转速 / (r·min ) Fig. 10 Excitation force on the supports
(h) 5 支点 Y 向
#
#
#
#
(g) X direction of 5 support (h) Y direction of 5 support
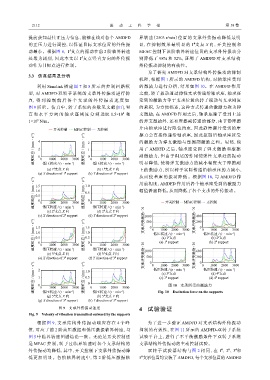
图 9 支承外传振动速度 4 试 验 验 证
Fig. 9 Velocity of vibration transmitted outward by the supports
根 据图 9, 支 承 结 构 外 传 振 动 响 应 存 在 4 个 峰 为了进一步验证 AMDFD 对支承结构外传振动
值,对应了前 2 阶高压激振和低压激振临界转速,与 抑制的有效性,在图 11 所示的 AMDFD-双转子系统
图 5 中临界转速图谱结论一致。无论是开关控制还 试验平台上,进行了不平衡激励条件下双转子系统
是 MFAC 控制,转子过临界转速时各个支承结构的 支承结构外传振动的主动控制试验。
外传振动均降低,其中,开关控制下支承外传振动降 双 转 子 试 验 器 结 构 与图 2 相 同 , 在 1 、 2 、 3 和
#
#
#
#
低更加明显。各阶临界转速中,第 2 阶低压激振临 5 支承位置均安装了 AMDFD,每个支承位置的 AMDFD