
Page 173 - 《振动工程学报》2025年第9期
P. 173
第 9 期 宋华庆,等:悬臂式转子-轴承系统热弯曲振动特性分析 2103
中质量单元建模,考虑其质量和转动惯量。 元法求解轴颈的三维温度场分布,计算轴颈的热膨
胀及等效热弯矩;随后基于所得参数进行转子动力
附加集
梁单元 中质量 测点 学计算,并将所得参数更新进行下一步的求解,直至
到达预定计算时间。
为提高计算效率,采用交错迭代格式 [13] 来执行
轴承1 轴承2 转子-轴承的瞬态分析。如图 9 所示,每个计算周期
图 7 转子-轴承系统模型简图 由两个阶段组成,在第一阶段,求解雷诺、能量、热
Fig. 7 Schematic diagram of rotor-bearing system model 传导和转子动力学方程,然后存储第一阶段结束时
转子和轴承的温度并将其用于第二阶段;在第二阶
结合前述分析,考虑热不平衡的系统的整体动
段,求解瞬态热传导方程以更新转子和轴承温度,考
力学方程为:
虑到转子的动态响应的变化远快于转子的温度变
.. . N ∑ N ∑ 化,并且转子的动态响应收敛很快,因此设置第二阶
iΩt
M x+D s x+K s x = F unb + M x + M y + F nx + F ny e
j=1 j=1 段的计算时间远长于第一阶段。该方法在保留足够
(26)
计算精度的同时极大地提高了计算效率。
式中,N 为节点数量;x 为位移;M 为质量矩阵;D s 包
括结构阻尼矩阵、轴承阻尼矩阵与陀螺矩阵;K s 为 t 1 <<t 2
刚度矩阵;F un 为初始不平衡力;F nx 、F n 表示由集中 t 1 t 2
b
y
时间t
质量单元离心所产生的不平衡力。 第1周期 第2周期···
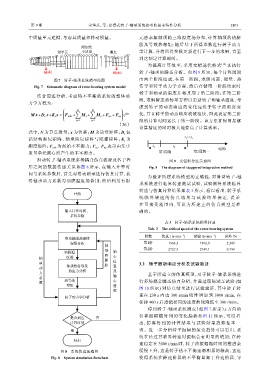
滑动转子-轴承系统多场耦合仿真流程及各子程 图 9 交错积分法示意图
序之间的数据传递关系如图 8 所示,在输入计算时 Fig. 9 The diagram of staggered integration method
间与系统参数后,首先对滑动轴承进行仿真计算,获
为验证所建系统模型的正确性,对滑动转子-轴
得轴承动力系数与油膜温度场备用;然后利用有限
承系统进行临界转速测试试验,试验测得系统临界
转速与仿真计算结果如表 3 所示,看以看出,转子系
开始
统 临 界 转 速 的 仿 真 结 果 与 试 验 结 果 接 近, 误 差
在 可 接 受 范 围 内, 可 认 为 所 建 立 的 仿 真 模 型 是 准
输入计算时间、 确的。
系统参数
表 3 转子-轴承系统临界转速
Tab. 3 The critical speed of the rotor-bearing system
−1
阶数 仿真 / (r·min ) 试验 /(r·min ) 误差 /%
−1
滑动轴承热流体
润滑分析 第1阶 1364.3 1396.9 2.389
轴
颈 第2阶 2727.3 2749.1 0.799
油膜温 轴
轴 度场 热 心
膨
承 胀 位 3.2 转子振动响应分析及试验验证
动 轴颈热传导及 置
力 热应力分析 及 基于所建立的仿真模型,对于转子-轴承系统进
系 轴
数 热等效 心 行多场耦合瞬态仿真分析,并通过现场试车试验 (如
弯矩 速 图 所示) 对仿真结果进行试验验证,其中转子转
度 10
速在 230 s 内 由 300 r/min 线 性 增 加 到 3000 r/min, 在
转子动力学分析
保持 400 s 后遵循相同的速度曲线降低至 300 r/min。
得到转子-轴承系统测点(如图 7 所示)x 方向的
位移振幅随时间的变化趋势如图 11 所示,可以看
是否到达 否
计算时间 出, 仿 真 得 到 的 计 算 结 果 与 试 验 结 果 趋 势 基 本 一
是 致。进一步分析转子振幅的演变趋势可以看出,系
统在经过其临界转速时振幅会有明显的增加;在转
结束
速稳定在 3000 r/min 时,转子的振幅随时间的推进会
图 8 系统仿真流程图 缓慢上升,这是转子热不平衡逐渐积累的缘故,这也
Fig. 8 System simulation flowchart 使得系统在降速阶段的不平衡量高于升速阶段,导