
Page 89 - 《振动工程学报》2025年第8期
P. 89
第 8 期 岳慧裕,等: 直升机主减速器周期撑杆混合振动控制的机电耦合特性及工作机理研究 1729
PSAPS 的力传递率如图 12 所示;进行主动控制所 动与噪声,难以通过提升驱动能力进行主动控制,而
需的驱动电压与电流如图 13 所示。 必须通过对 PSAPS 进行结构设计来降低所需驱动
电压与电流。
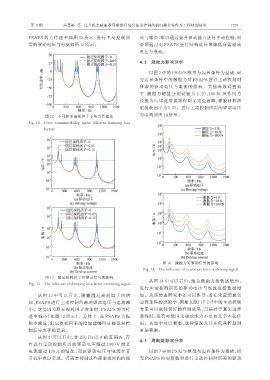
4. 2 激振力影响分析
以图 7 中的 PSAPS 模型与边界条件为基础,研
究边界条件中的激振力对 PSAPS 进行主动控制时
所需的驱动电压与电流的影响。其他参数设置如
下:激振力幅值分别设置为 1、10、 100 N;反作用力
设置为 0,即此时振动得到了完全衰减,橡胶材料阻
尼损耗因子为 0.05。进行主动控制所需的驱动电压
与电流如图 14 所示。
图 12 不同阻尼损耗因子下的力传递率
Fig. 12 Force transmissibility under different damping loss
factors
图 14 激振力对驱动信号的影响
Fig. 14 The influence of excitation force on driving signal
图 13 阻尼损耗因子对驱动信号的影响
从图 14 中可以看出,随着激振力指数级增加,
Fig. 13 The influence of damping loss factor on driving signal
进行主动控制所需的驱动电压与电流也指数级增
从 图 13 中 可 以 看 出 ,随 着 阻 尼 损 耗 因 子 的 增 加。从该仿真研究中还可以推导:若在未应用真实
加,PSAPS 进行主动控制所需的驱动电压与电流减 边界条件的试验中,例如文献[17‑21]中的主动控制
小。这是因为阻尼损耗因子增加时,PSAPS 的力传 方案可以取得较好的控制效果,当其处于真实边界
递率减小(如图 12 所示)。总体上,在 PSAPS 共振 条件时,很有可能因为驱动能力不足而几乎不起作
频率附近,阻尼损耗因子的增加能够明显降低对控 用。从图中可以看出,这种情况尤其在低频控制时
制信号水平的需求。 更加普遍。
从图中可以看出,在 250 Hz 以下的范围内,存
4. 3 周期数影响分析
在进行主动控制所需的驱动电压超过 1000 V 或者
电流超过 100 A 的情况,而该驱动电压与电流在直 以图 7 中的 PSAPS 模型与边界条件为基础,研
升机中难以实现。若需要抑制这些频率范围内的振 究 PSAPS 的周期数对进行主动控制时所需的驱动