
Page 19 - 卫星导航2021年第1-2合期
P. 19
El‑Sheimy and Li Satell Navig (2021) 2:7 Page 9 of 23
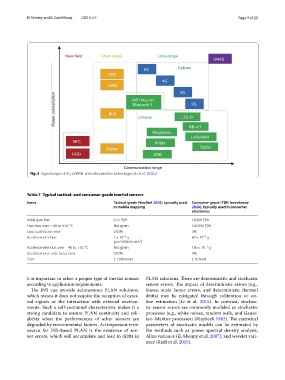
Fig. 3 Signal ranges of 5G, LPWAN, and other wireless technologies (Li et al. 2020a)
Table 7 Typical tactical- and consumer-grade inertial sensors
Items Tactical-grade (NovAtel 2020), typically used Consumer-grade (TDK-InvenSense
in mobile mapping 2020), typically used in consumer
electronics
Initial gyro bias 0.75 (°)/h 18,000 (°)/h
Gyro bias over − 40 to + 85 °C Not given 108 000 (°)/h
Gyro scale factor error 0.03% 3%
–3
–3
Accelerometer bias 1 × 10 g 60 × 10 g
(g = 9.806 65 m/s ) 2
–3
Accelerometer bias over − 40 to + 85 °C Not given 180 × 10 g
Accelerometer scale factor error 0.03% 3%
Cost $ 1,000 level $ 10 level
it is important to select a proper type of inertial sensors PLAN solutions. Tere are deterministic and stochastic
according to application requirements. sensor errors. Te impact of deterministic errors (e.g.,
Te INS can provide autonomous PLAN solutions, biases, scale factor errors, and deterministic thermal
which means it does not require the reception of exter- drifts) may be mitigated through calibration or on-
nal signals or the interaction with external environ- line estimation (Li et al. 2015). In contrast, stochas-
ments. Such a self-contained characteristic makes it a tic sensor errors are commonly modeled as stochastic
strong candidate to ensure PLAN continuity and reli- processes (e.g., white noises, random walk, and Gauss-
ability when the performances of other sensors are ian–Markov processes) (Maybeck 1982). Te statistical
degraded by environmental factors. An important error parameters of stochastic models can be estimated by
source for INS-based PLAN is the existence of sen- the methods such as power spectral density analysis,
sor errors, which will accumulate and lead to drifts in Allan variance (El-Sheimy et al. 2007), and wavelet vari-
ance (Radi et al. 2019).