
Page 14 - 卫星导航2021年第1-2合期
P. 14
El‑Sheimy and Li Satell Navig (2021) 2:7 Page 4 of 23
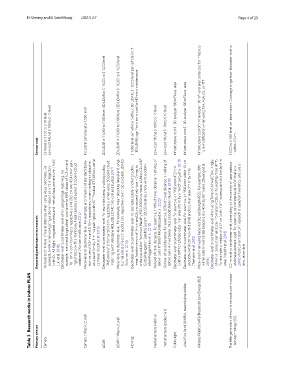
Cameras at $ 100 to $ 10 level; Low‑cost IMU at $ 100 to $ 10 level Industrial cameras at $ 1,000 level 2D LiDAR in $1,000 to $100 level; 3D LiDAR in $ 10,000 to $ 1,000 level 2D LiDAR in $1,000 to $100 level; 3D LiDAR in $ 10,000 to $ 1,000 level $ 1,000 level per vehicle (without 3D LiDAR); $ 10,000 level per vehicle (with 3D LiDAR); signifcant extra cost for HD‑map maintenance Low‑cost IMU at $ 100 to $ 10 level Low‑cost IMU at $ 100 to $ 10 l
Sensor cost within 100 m
Reported performance in research 1% level to 0.1% level of travel distance when using visual odometry. For example, 0.46% when navigating a drone indoors on a 75 m trajectory (with DJI A3 fight integrated camera and Inertial Measurement Unit (IMU)) (Lin et al. 2018); Decimeter‑level to centimeter‑level when using image matching. For example, lateral and longitudinal location error RMS values of 14.3 cm and 19.1 cm in downtown tests, respectively, a
Research works in indoor PLAN Ultra‑Wide Band (UWB)/ultrasonic/pseudolite Wireless Fidelity (WiFi)/Bluetooth Low Energy (BLE) The ffth generation of mobile network communica‑
Table 3 Primary sensor Camera Camera (infrastructural) LiDAR LiDAR (infrastructural) HD map Inertial sensors (vehicle) Inertial sensors (pedestrian) Visible light tion technology (5G)