
Page 110 - 卫星导航2021年第1-2合期
P. 110
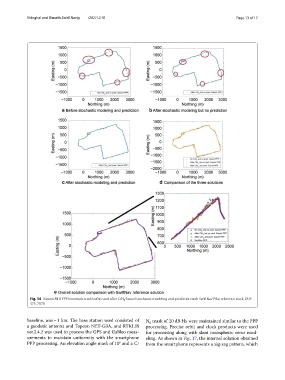
Shinghal and Bisnath Satell Navig (2021) 2:10 Page 13 of 17
Fig. 14 Xiaomi MI 8 PPP kinematic track before and after C/N -based stochastic modeling and prediction with SwiftNav Piksi reference track, DOY
0
325, 2020
baseline, was ~ 1 km. Te base station used consisted of N mask of 20 dB·Hz were maintained similar to the PPP
0
a geodetic antenna and Topcon NET-G3A, and RTKLIB processing. Precise orbit and clock products were used
ver.2.4.2 was used to process the GPS and Galileo meas- for processing along with slant ionospheric error mod-
urements to maintain uniformity with the smartphone eling. As shown in Fig. 17, the internal solution obtained
PPP processing. An elevation angle mask of 10° and a C/ from the smartphone represents a zig-zag pattern, which