
Page 36 - 《武汉大学学报(信息科学版)》2025年第10期
P. 36
第 50 卷第 10 期 郑 凯等:多频 GNSS 非差非组合 PPP 多径误差修正及定位性能评估 1971
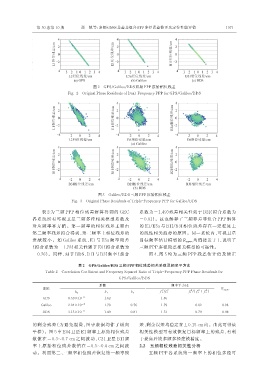
图 2 GPS/Galileo/BDS 双频 PPP 原始相位残差
Fig. 2 Original Phase Residuals of Dual-Frequency PPP for GPS/Galileo/BDS
图 3 Galileo/BDS 三频 PPP 原始相位残差
Fig. 3 Original Phase Residuals of Triple-Frequency PPP for Galileo/BDS
表 2 为三频 PPP 相位残差解算得到的 GEC 系数为−1.49)残差相关性强于 B2I(拟合系数为
各系统所有可视卫星三频多径相关模型系数及 −0.81)。这也解释了三频非差非组合 PPP 解算
对应频率平方值。第一频率的相位残差主要由 的 E1/E5a 与 B1I/B3I 相位残差存在一定程度上
第二频率残差拟合得到,第三频率上相位残差的 的线性相关趋势的原因。同一系统内,可视卫星
贡 献 较 小 。 如 Galileo 系 统 ,E1 与 E5a 频 率 残 差 目标频率估计模型的 R square 均值接近于 1,说明了
(拟合系数为−1.78)相关性强于 E6(拟合系数为 三频 PPP 多径残差相关模型的可靠性。
−0.76)。同样,对于 BDS,B1I 与 B3I 频率(拟合 图 4、图 5 均为三频 PPP 残差估计值及修正
表 2 GPS/Galileo/BDS 三频 PPP 相位残差相关系数及频率平方比
Table 2 Correlation Coefficient and Frequency Squared Ratio of Triple-Frequency PPP Phase Residuals for
GPS/Galileo/BDS
系数 频率平方比
系统 R square
2 2 2 2 2
b 0 b 1 b 2 -f 1 /f 2 -f 1 /( f 2 + f 3 )
GPS 8.59×10 -6 -1.62 -1.65
-4
Galileo 2.24×10 -1.78 -0.76 -1.79 -0.82 0.96
BDS 3.15×10 -6 -1.49 -0.81 -1.51 -0.79 0.98
的剩余残差(为避免混叠,图中数据均作了纵向 差,剩余误差均稳定在±0.15 cm 内。由此可得该
平移)。图 5 中 E04 卫星 E1 频率上原始相位残差 相关性模型可有效恢复目标频率上的残差,有利
数值在-0.3~0.7 cm 之间波动,C21 卫星 B1I 频 于提高后续多频多径建模精度。
率上原始相位残差数值在-0.5~0.4 cm 之间波 2.2 五频相位残差相关性分析
动。利用第二、三频率相位残差恢复第一频率残 五频 PPP 各系统第一频率上的相位多径可