
Page 39 - 《武汉大学学报(信息科学版)》2025年第10期
P. 39
1974 武 汉 大 学 学 报 (信 息 科 学 版) 2025 年 10 月
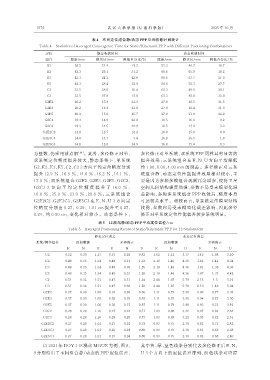
表 4 不同定位组合静/动态 PPP 平均收敛时间统计
Table 4 Statistics of Averaged Convergence Time for Static/Kinematic PPP with Different Positioning Combinations
定位 静态收敛时间 动态收敛时间
组合 原始/min 修正后/min 降低百分比/% 原始/min 修正后/min 降低百分比/%
G2 26.5 21.4 19.2 52.3 46.7 10.7
E2 42.3 29.1 31.2 80.6 65.9 18.2
E3 42.3 24.2 42.8 80.6 63.7 21.0
E5 42.3 28.4 32.9 80.6 58.3 27.7
C2 33.5 28.0 16.4 62.3 49.8 20.1
C3 33.5 27.8 17.0 62.3 48.0 23.0
G2E2 20.2 15.9 21.3 27.0 18.5 31.5
G2E3 20.2 15.8 21.8 27.0 18.4 31.9
G2E5 20.2 15.0 25.7 27.0 21.0 22.2
G2C2 19.3 14.9 22.8 18.5 16.8 9.2
G2C3 19.3 14.5 24.9 18.5 17.9 3.2
G2E2C2 14.8 12.7 14.2 16.8 15.8 6.0
G2E3C3 14.8 13.7 7.4 16.8 16.5 1.8
G2E5C3 14.8 12.6 14.9 16.8 15.4 8.3
为整数,仍采用浮点解 [26] 。此外,多径修正对单、 多径修正对单系统、双系统 PPP 同样具有显著的
双系统定位精度提升较大,静态条件下,单系统 提升效果;三系统组合在 E、N、U 方向平均降低
G2、E2、E3、E5、C2、C3 3 方向平均定位精度分别 约 1.00、1.00、4.00 mm 的误差。多径修正对三系
提 升 12.9 % 、16.9 % 、14.6 % 、16.2 % 、14.1 % 、 统组合静、动态定位性能提升效果相对较小,主
17.0 %;双系统组合 G2E2、G2E3、G2E5、G2C2、 要是因为多频多模组合观测冗余增多,使得卫星
G2C3 3 方 向 平 均 定 位 精 度 提 升 了 16.0 % 、 空间几何结构强度增强,参数不易受未模型化误
16.8 % 、35.0 % 、33.0 % 、20.8 % ;三 系 统 组 合 差影响,多频多系统组合 PPP 收敛后,精度本身
G2E2C2、G2E3C3、G2E5C3 在 E、N、U 3 方 向 定 可达较高水平。相较而言,单系统定位模型结构
位 精 度 分 别 由 0.27、 0.29、 1.01 cm 提 升 至 0.27、 较弱,参数容易受未模型化误差影响,因此多径
0.24、 约 0.80 cm,变化相对较小。动态条件下, 修正对单系统定位性能提升较多系统明显。
表 5 12 测站静/动态 PPP 平均定位误差/cm
Table 5 Averaged Positioning Errors of Static/Kinematic PPP for 12 Stations/cm
静态定位误差 动态定位误差
系统/频率组合 原始数据 多径修正 原始数据 多径修正
E N U E N U E N U E N U
G2 0.52 0.30 1.17 0.57 0.28 0.83 1.62 1.12 3.77 1.45 1.08 3.10
E2 0.48 0.35 1.54 0.48 0.31 1.32 2.10 1.46 4.36 1.82 1.41 4.34
E3 0.48 0.35 1.54 0.48 0.30 1.25 2.10 1.46 4.36 1.81 1.38 4.38
E5 0.48 0.35 1.54 0.49 0.33 1.28 2.10 1.46 4.36 1.87 1.37 4.42
C2 0.51 0.32 1.51 0.47 0.31 1.24 2.44 1.87 5.79 2.13 1.5 5.16
C3 0.51 0.32 1.51 0.47 0.30 1.28 2.44 1.87 5.79 2.10 1.48 5.04
G2E2 0.27 0.30 1.08 0.33 0.26 0.86 1.11 0.79 2.90 0.88 0.77 2.38
G2E3 0.27 0.30 1.08 0.28 0.26 0.89 1.11 0.79 2.90 0.94 0.75 2.50
G2E5 0.27 0.30 1.08 0.30 0.27 0.87 1.11 0.79 2.90 0.93 0.73 2.46
G2C2 0.28 0.28 1.16 0.27 0.24 0.71 1.03 0.88 3.22 0.97 0.83 2.62
G2C3 0.28 0.28 1.16 0.28 0.25 0.73 1.03 0.88 3.22 0.93 0.82 2.51
G2E2C2 0.27 0.29 1.01 0.27 0.24 0.78 0.93 0.75 2.78 0.83 0.71 2.42
G2E3C3 0.27 0.29 1.01 0.25 0.24 0.80 0.93 0.75 2.78 0.83 0.69 2.38
G2E5C3 0.27 0.29 1.01 0.27 0.24 0.80 0.93 0.75 2.78 0.82 0.68 2.40
以 2021 年 DOY 118 测站 MGUE 为例,图 8、 其中黄、绿、蓝色线条分别代表多径修正后 E、N、
9 分别给出了不同组合静/动态的 PPP 定位误差, U 3 个方向上的定位误差序列,红色线条对应原