
Page 19 - 《武汉大学学报(信息科学版)》2025年第10期
P. 19
1954 武 汉 大 学 学 报 (信 息 科 学 版) 2025 年 10 月
3.4 安装角估计对组合导航性能的影响分析 二:不估计安装角的紧组合滤波算法。两者的主
为了进一步分析本文的安装角估计对智能 要区别是没有安装角估计结果,智能手机车载组
手机车载导航定位精度的影响,设计了两种数据 合导航系统不能使用 NHC 算法。
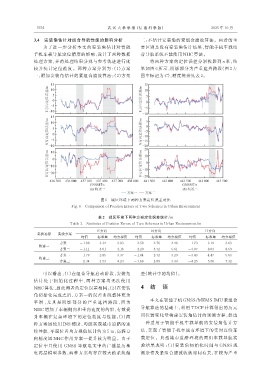
处理方案,并将处理结果分别与参考轨迹进行比 将两种方案的定位误差分别投影到 n 系,结
较并统计定位精度。两种方案分别为:(1)方案 果如图 6 所示,阴影部分为严重遮挡路段(图 2 左
一:附加安装角估计的紧组合滤波算法;(2)方案 图中标记为 C),精度统计见表 2。
图 6 城区环境下两种方案定位误差对比
Fig. 6 Comparison of Position Errors of Two Schemes in Urban Environment
表 2 城区环境下两种方案定位误差统计/m
Table 2 Statistics of Position Errors of Two Schemes in Urban Environment/m
E 方向 N 方向 U 方向
实验场景 实验方案
均值 标准差 均方根值 均值 标准差 均方根值 均值 标准差 均方根值
方案一 -1.88 3.34 3.83 3.50 2.76 4.46 1.73 3.19 3.63
轨迹一
方案二 -1.11 4.01 4.16 4.20 3.72 5.61 -3.07 8.03 8.59
方案一 1.79 2.85 3.37 -1.84 2.72 3.29 -3.43 4.47 5.63
轨迹二
方案二 2.34 3.53 4.23 -1.66 2.89 3.33 -4.25 5.96 7.32
可以看出:(1)在组合导航启动阶段,安装角 差(统计中的均值)。
估 计 处 于 初 始 化 过 程 中 ,两 种 方 案 均 无 法 使 用
NHC 算法,因此两者的定位误差相同。(2)在安装 4 结 语
角初始化完成之后,方案一的误差曲线整体更为
本文在智能手机 GNSS/MEMS IMU 紧组合
平 滑 ,尤 其 是 阴 影 部 分 的 严 重 遮 挡 路 段 ,因 为
NHC 增加了车辆侧向和垂向速度的约束,有效提 导航算法的基础上,利用 TDCP 计算得出的历元
升车辆在复杂环境下的定位精度与性能。(3)两 间位置变化量构建安装角估计的观测方程,提出
种方案因使用 INS 辅助,均能实现城市道路的连 一种适用于智能手机车载导航的安装角估计方
续导航,平面位置均方根值统计约为 5 m,高程方 法,实现了智能手机在城市环境下的实时连续车
向精度因 NHC 作用方案一提升较为明显。由于 载定位。典型城市道路环境的两组车载导航实
定位中只使用 GNSS 导航电文中的广播星历和 验结果表明:(1)安装角初始化时间与 GNSS 观
电离层模型参数,两种方案均存在较大的系统偏 测条件及紧组合滤波收敛时间有关,在较为严重