
Page 15 - 《武汉大学学报(信息科学版)》2025年第10期
P. 15
1950 武 汉 大 学 学 报 (信 息 科 学 版) 2025 年 10 月
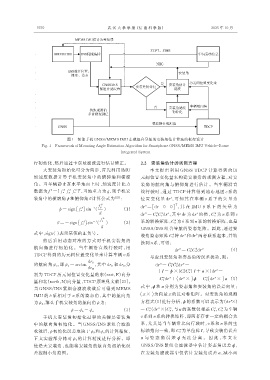
图 1 智能手机 GNSS/MEMS IMU 车载组合导航的安装角估计算法的框架设计
Fig. 1 Framework of Mounting Angle Estimation Algorithm for Smartphone GNSS/MEMS IMU Vehicle-Borne
Integrated System
行初始化,然后通过卡尔曼滤波进行估计修正。 2.2 安装角估计的观测方程
大安装角初始化可分为两步,首先利用 IMU 本 文 提 出 利 用 GNSS TDCP 计 算 得 到 的 历
加速度数据计算手机安装角中的俯仰角和横滚 元间位置变化量来构建安装角的观测方程,对安
角。当车辆静止在水平地面上时,加速度计比力 装角的航向角与俯仰角进行估计。当车辆沿直
b
b
b
b
数据为 f =[ f x f y f z ] ,当地重力为 g,则手机安 线行驶时,通过 TDCP 计算得到地心地固 e 系的
T
e
装角中的横滚角 ϕ 和俯仰角 θ 计算公式为 [22] : 位 置 变 化 量 dr ,可 知 其 在 车 辆 v 系 下 的 矢 量 为
b v T
b -1 f y dr =[ dr 0 0 ] ,其 在 IMU b 系 下 的 矢 量 为
ϕ = sign( f z ) sin ( ) (1)
g dr = C n C e dr ,其中 dr 为 dr 的模, C e 为 n 系到 e
e
n
e
b
n
b
b
b
b f x 系的转换矩阵, C n 为 b 系到 n 系的转换矩阵,也是
θ =-sign( f z ) sin -1 ( ) (2)
g
GNSS/INS 组合导航的姿态矩阵。因此,通过安
式中, sign ( ) 表示某值的正负号。 b v b
装角姿态矩阵 C v 将 dr 和 dr 两者联系起来,并转
然后采用动态对准的方式对手机安装角的
换到 n 系,可得:
航 向 角 进 行 初 始 化 。 当 车 辆 沿 直 线 行 驶 时 ,用 n n b v
dr = C b C v dr (4)
TDCP 得到的历元间位置变化量来计算车辆 v 系
考虑到安装角和姿态角的误差扰动,则:
dr E n ̂ n ̂ b v
的航向角 ψ v,即 ψ v = arctan ,其中 dr E 和 dr N 分 dr = C b C v dr =
dr N n b v
[ I - ϕ ×] C b C v [ I + α ×] dr =
别为 TDCP 历元间位置变化量的东(east,E)向分
v
n
v
n
n
C v dr +( dr × ) ϕ - C v( dr × ) α (5)
量和北(north,N)向分量,TDCP 原理见文献[23]。
式中, ϕ 和 α 分别为姿态角和安装角的误差向量;
当 GNSS/INS 紧组合滤波收敛后可得到 MEMS
IMU 的 b 系相对于 n 系的姿态角,其中的航向角 ( x × ) 为向量 x 的反对称矩阵。对安装角的观测
n
为 ψ b,那么手机安装角的航向角 ψ 为: 方程式(5)进行分析, ϕ 的系数可以表示为(dr × )
v
v
v
v
n
(3) = C v ( dr ×)C n ,与 α 的系数仅相差 C n , C n 为车辆
ψ = ψ b - ψ v
手机大安装角初始化过程的关键是安装角 v 系到 n 系的转换矩阵,即两者存在一定的耦合关
中的航向角初始化。当 GNSS/INS 紧组合滤波 系,尤其是当车辆沿北向行驶时,v 系和 n 系的坐
v
收敛后, ψ 初始化误差取决于 ψ b 和 ψ v 的计算精度, 标轴指向一致,即 C n 为单位阵 I,导致安装角误差
下文实验部分将对 ψ v 的计算精度进行分析。即 α 与 姿 态 角 误 差 ϕ 无 法 分 离 。 因 此 ,本 文 在
使是大安装角,也能将安装角的航向角初始化误 GNSS/INS 紧组合滤波器中估计姿态角误差 ϕ,
差控制小角范围。 在安装角滤波器中仅估计安装角误差 α,减小两