
Page 18 - 《武汉大学学报(信息科学版)》2025年第10期
P. 18
第 50 卷第 10 期 王甫红等:智能手机 GNSS/MEMS IMU 车载组合导航的安装角估计算法 1953
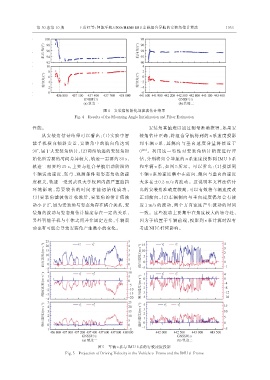
图 4 安装角初始化与滤波估计结果
Fig. 4 Results of the Mounting Angle Initialization and Filter Estimation
性能。 安装角真值难以通过测量准确获得,如果安
从安装角估计结果可以看出:(1)实验中智 装角估计正确,将组合导航得到的 n 系速度投影
能 手 机 横 向 倾 斜 安 置 ,安 装 角 中 的 航 向 角 达 到 到 车 辆 v 系 ,其 侧 向 与 垂 向 速 度 分 量 将 接 近 于
90°,属于大安装角估计。(2)两组轨迹的安装角初 0 [13] 。 利 用 这 一 特 性 对 安 装 角 估 计 精 度 进 行 评
始化所需要的时间差异较大,轨迹一需要约 80 s, 估,分别将组合导航的 n 系速度投影到 IMU b 系
轨迹二需要约 35 s,主要与组合导航启动阶段的 和车辆 v 系,如图 5 所示。可以看出:(1)投影到
车辆运动速度、转弯、观测条件和姿态角收敛速 车辆 v 系的速度集中在前向、侧向与垂向的速度
度相关,轨迹一受到武汉大学校园内的严重遮挡 大多在±0.2 m/s 内波动。这说明本文算法估计
环 境 影 响 ,需 要 较 长 的 时 间 才 能 初 始 化 成 功 。 出的安装角准确度较高,可以有效将车辆速度改
(3)安装角滤波估计收敛后,安装角的估计值波 正到前向。(2)车辆侧向与垂向速度偶尔会有接
动小于 2°,因为安装角与姿态角存在耦合关系,安 近 1 m/s 的波动,两个方向速度产生波动的时间
装角的波动与姿态角估计精度存在一定的关系, 一致。这些波动主要集中在角度较大的转弯处,
另外智能手机与车体之间并非固定连接,车辆震 因为手机置于车辆前端,投影到 v 系计算时没有
动也有可能会导致安装角产生微小的变化。 考虑 NHC 杆臂影响。
图 5 车辆 v 系与 IMU b 系的行驶速度投影
Fig. 5 Projection of Driving Velocity in the Vehicle v-Frame and the IMU b-Frame