
Page 129 - 《武汉大学学报(信息科学版)》2025年第9期
P. 129
第 50 卷第 9 期 毛正君等:基于数据融合的梯田型黄土滑坡隐患监测预警 1857
系数更高,因此剔除降雨量数据。 梯田型黄土滑坡隐患 GNSS 地表位移监测站的
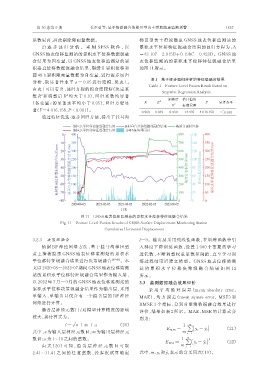
2)逐 步 回 归 分 析 。 采 用 SPSS 软 件 ,以 累积水平位移特征级融合结果的回归方程为:A
GNSS 地表位移监测站的累积水平位移数据级融 =43.107−2.015B+0.198C−0.423D。GNSS 地
合结果为因变量,以 GNSS 地表位移监测站的累 表位移监测站的累积水平位移特征级融合结果
积垂直位移数据级融合结果、裂缝计累积位移和 如图 11 所示。
前 48 h 累积降雨量数据为自变量,进行逐步回归
表 1 基于逐步回归分析的特征级融合结果
分析,取显著性水平 α = 0.05 进行建模,见表 1。
Table 1 Feature Level Fusion Result Based on
由表 1 可以看出,回归方程的拟合度较好(决定系
Stepwise Regression Analysis
数 R 和 调 整 后 R 均 大 于 0.9),回 归 系 数 均 显 著
2
2
调整后 估计值的
(各变量 t 的显著水平均小于 0.05),回归方程显 R R 2 R 2 标准误差 F 显著水平
著(F=4 016.158,P<0.001)。
0.969 0.939 0.939 14.437 4 016.158 <0.001
通过特征优选-逐步回归方法,得出了挂马沟
图 11 GNSS 地表位移监测站的累积水平位移特征级融合结果
Fig. 11 Feature Level Fusion Results of GNSS Surface Displacement Monitoring Station
Cumulative Horizontal Displacement
3.2.3 决策级融合 l=9。输出层采用纯线性函数,在训练函数中引
依据 BP 神经网络方法,基于挂马沟梯田型 入梯度下降训练函数,设置 1 000 个重复的学习
黄土滑坡隐患 GNSS 地表位移监测站的累积水 迭代数,不断调整权重系数和阈值,直至学习训
平位移特征级融合结果进行决策级融合 [47-48] 。本 练过程结束后建立模型。GNSS 地表位移监测
文以 2020⁃08—2022⁃07 期间 GNSS 地表位移监测 站 的 累 积 水 平 位 移 决 策 级 融 合 结 果 如 图 12
站的累积水平位移特征级融合结果作为输入层, 所示。
以 2022 年 7 月—9 月的 GNSS 地表位移监测站的 3.3 监测数据融合效果评价
累积水平位移决策级融合结果作为输出层,采用 采 用 平 均 绝 对 误 差(mean absolute error,
单输入、单输出且仅含有一个隐含层的 BP 神经 MAE)、均 方 误 差(mean square error, MSE)和
网络进行计算。 RMSE 3 个指标,分别对监测数据融合效果进行
隐含层神经元数目 l 对模型计算精度的影响 评价,结果如表 2 所示。MAE、MSE 的计算式分
较大,其计算式为: 别为:
l = n + m + a (20) 1 m
E MAE = ∑| y i - y ̂ i | (21)
式中,n 为输入层神经元数目;m 为输出层神经元 m i = 1
数目;a 为 1~10 之间的整数。 1 m i) 2
E MSE = ∑( y i - y ̂ (22)
由 式(20)可 知 ,隐 含 层 神 经 元 数 目 可 取 m i = 1
2.41~11.41 之 间 的 任 意 整 数 ,经 多 次 试 算 确 定 式中,m、 y i 和 y ̂ 表示的含义同式(19)。
i