
Page 126 - 《武汉大学学报(信息科学版)》2025年第9期
P. 126
1854 武 汉 大 学 学 报 (信 息 科 学 版) 2025 年 9 月
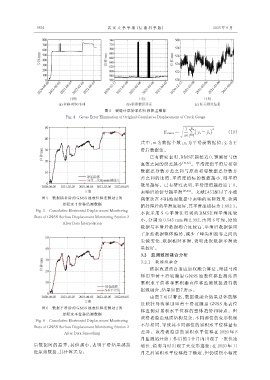
图 4 裂缝计原始累积位移粗差剔除
Fig. 4 Gross Error Elimination of Original Cumulative Displacement of Crack Gauge
1 m ) 2
E RMSE = ∑( y i - y ̂ i (19)
m i = 1
式中,m 为数据个数; y i 为平滑前数据值; y ̂ 为平
i
滑后数据值。
已有研究表明,RMSE 越接近 0,预测值与仿
真值之间的误差越小 [41-42] 。平滑度指平滑后相邻
数据差分数方差之和与原始相邻数据差分数方
差之和的比值,平滑度指标的数值越小,则平滑
效果越好。已有研究表明,平滑度值越趋近于 0,
去噪后的信号越平滑 [43-44] 。文献[45]探讨了小波
图 5 数据插补后的 GNSS 地表位移监测站 2 的 阈值法在不同地震数据中去噪的实际效果,软阈
累积水平位移监测数据
值处理后的平滑度较好,其平滑度指标为 1.682 3。
Fig. 5 Cumulative Horizontal Displacement Monitoring
本次采用 S⁃G 平滑法得到的 RMSE 和平滑度较
Data of GNSS Surface Displacement Monitoring Station 2
小,分别为 0.545 mm 和 2.992,由图 6 可知,原始
After Data Interpolation
数据与平滑后数据吻合度较高,平滑后数据保留
了原始数据整体趋势,减少了峰尖和波谷之间的
尖锐变化,数据相对平滑,表明此次数据平滑效
果较好。
3.2 监测数据融合分析
3.2.1 数据级融合
依据改进的自适应加权融合算法,对挂马沟
梯田型黄土滑坡隐患 GNSS 地表位移监测站的
累积水平位移和累积垂直位移监测数据进行数
据级融合,结果如图 7 所示。
由图 7 可以看出,数据级融合结果总体能够
反映挂马沟梯田型黄土滑坡隐患 GNSS 地表位
图 6 数据平滑后的 GNSS 地表位移监测站 2 的
移监测站累积水平位移的整体趋势和特点。但
累积水平位移监测数据
该滑坡隐患地质结构复杂,不同部位的变形机制
Fig. 6 Cumulative Horizontal Displacement Monitoring
不尽相同,导致其不同部位的累积水平位移量有
Data of GNSS Surface Displacement Monitoring Station 2
After Data Smoothing 差异。该滑坡隐患的累积水平位移在 2020 年 8
月监测站开始工作后的 3 个月内出现了一次快速
后数据间的差异,其值越小,表明平滑结果越接 增长,说明当时出现了大变形迹象;在 2020 年 11
近原始数据,其计算式为: 月之后累积水平位移趋于稳定,但仍缓慢小幅度