
Page 198 - 《软件学报》2021年第10期
P. 198
3170 Journal of Software 软件学报 Vol.32, No.10, October 2021
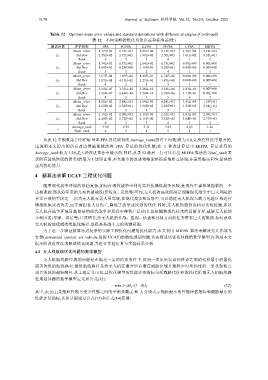
Table 12 Optimal mean error values and standard deviations with different strategies (Continued)
表 12 不同策略的优化均值误差和标准差(续)
测试函数 评估指标 FPA IGFPA ILFPA IPFPA CFPA MIFPA
Mean_error 1.17E+03 1.12E+03 8.92E+02 1.12E+03 5.70E+02 5.74E+02
f 14 Std.Dev 2.28E+02 2.71E+02 1.90E+02 2.50E+02 1.01E+02 9.53E+01
Rank 6 5 3 4 1 2
Mean_error 1.74E+02 1.77E+02 1.64E+02 1.75E+02 0.00E+00 0.00E+00
f 15 Std.Dev 1.04E+01 8.28E+00 1.10E+01 1.20E+01 0.00E+00 0.00E+00
Rank 3 5 2 4 1 1
Mean_error 7.67E01 1.07E01 8.40E01 6.74E01 0.00E+00 0.00E+00
f 16 Std.Dev 1.07E01 4.13E02 1.27E01 1.87E01 0.00E+00 0.00E+00
Rank 4 2 5 3 1 1
Mean_error 3.60E07 1.33E14 3.28E10 3.18E06 1.83E01 0.00E+00
f 17 Std.Dev 3.26E07 2.44E14 5.74E10 2.76E06 3.13E01 0.00E+00
Rank 4 2 3 5 6 1
Mean_error 1.52E+02 2.88E+01 1.04E+02 6.24E+01 3.65E+04 1.75E01
f 18 Std.Dev 4.52E+02 2.33E+01 1.58E+02 5.25E+01 1.32E+05 2.58E01
Rank 5 2 4 3 6 1
Mean_error 2.10E+01 2.09E+01 2.10E+01 2.10E+01 2.03E+01 2.09E+01
f 19 Std.Dev 4.40E02 5.72E02 4.15E02 3.52E02 3.04E01 2.77E01
Rank 6 3 5 4 1 2
Average_rank 4.00 2.95 3.11 3.63 2.63 1.26
Total_rank 6 3 4 5 2 1
从表 12 中倒数第 2 行可知:基本 FPA 算法取得的 Average_rank(排名平均数)值为 4.0,是所有算法中最大的,
这说明本文提出的所有改进措施都能改善 FPA 算法的优化性能;在 5 种改进算法中,MIFPA 算法获得的
Average_rank 值为 1.26,是 5 种改进算法中最小的.同时,从表 12 最后一行可以看出,MIFPA 算法的 Total_rank(表
示所有算法性能的排名)的值为 1.这即证明,本文提出的改进策略能够很好地相互协调,并最终提高 FPA 算法的
全局优化能力.
4 新算法求解 UCAV 工程优化问题
随着现代战争环境的日趋复杂,如何在现代战争中利用高科技降低战争风险,是现代军事领域面临的一个
重要课题.而从近年来的几场典型战役(伊拉克、反恐等)可知,无人机的高效使用是规避现代战争中巨大风险的
非常有效的手段之一.因为无人机无需人员驾驶,在现代战争和反恐中,可以通过无人机深入敌方危险区域进行
情报收集或者攻击,而无需担忧人员伤亡,降低了战争或反恐的代价.同时,无人机的造价也相对比较低廉,所以
无人机在战争环境日益复杂的现代战争和反恐中得到广泛使用.但是随着现代技术的日新月异,威胁无人机的
不利因素(导弹、雷达等)日益增多,给无人机的作战、监视、侦查和其他方面的任务带来巨大的挑战.如何获取
无人机的最优或次优航线路径,是提高其战斗力的关键问题.
为了进一步验证新算法对复杂的实际工程优化问题的优化能力,本文利用 MIFPA 算法来解决无人作战飞
行器(unmanned combat air vehicle,简称 UCAV)的航线规划问题.首先阐述该优化问题的数学模型,再利用本文
提出的改进算法求解该优化问题,并进行实验仿真与实验结果分析.
4.1 无人机航线优化问题的数学模型
无人机航线路径规划问题是在满足一定的约束条件下,找到一条从出发点到终点之间的代价最小的最优
或者次优的航线路径.最优航线路径是指无人机在避开所有潜在威胁区域且能耗少时所经过的一条从起始点
到目的地的最短路径.从上述定义可知,其优化模型的性能评估指标包括威胁代价和能耗代价,故无人机航线路
径规划问题的数学模型定义如公式(12):
min J=J t +(1)J f (12)
其中,[0,1]是能耗性能与安全性能之间的平衡系数;J f 和 J t 分别表示能耗最小的性能评估指标和威胁最小的
性能评估指标,其值分别通过公式(13)和公式(14)获得: