
Page 125 - 《摩擦学学报》2021年第2期
P. 125
270 摩 擦 学 学 报 第 41 卷
(a) r b1 (b) ′
′ N 2 N 2
O 1 N 1 O 1
1
′ l c (t) ′
N 2 B 1 B 1
l cm (t)
i
B 1
′
i
B 1
β b1 l cj+1 (t)
D D ′
……
D D ′ P P ′
P P ′ C C ′
C C ′
i
l c (t) l cj (t)
i
l c1 (t)
i
n
β b2 l c (t) B 2 B 2 ′
B 2 ′
B 2
′ ′
N 1 N 1 N 1
N 1
′
O 2
r b2 O 2
B
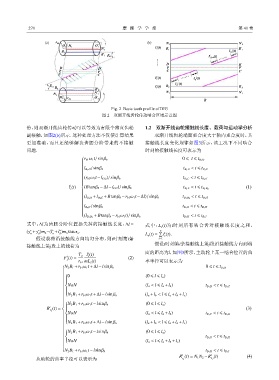
Fig. 2 Basic tooth profile of DIG
图 2 双渐开线齿轮传动啮合区域示意图
份,则双渐开线齿轮传动可以等效为有限个薄直齿轮 1.2 双渐开线齿轮接触线长度、载荷与运动学分析
副接触,如图2(b)所示. 这种处理方法不仅使计算结果 双渐开线齿轮端面重合度大于轴向重合度时,其
更加准确,而且还能够解决齿腰分阶带来的不接触 接触线长度变化规律如图3所示,该工况下不同啮合
问题. 时刻的接触线长度可表示为
r b1 ω 1 t/sinβ b 0 ⩽ t ⩽ t B 1 D
l B 1 D /sinβ b t B 1 D < t ⩽ t B 1 C
(r b1 ω 1 t −l CD )/sinβ b t B 1 C < t ⩽ t B 1 E
i
l (t) = (Btanβ b −∆l−l CD )/sinβ b t B 1 E < t ⩽ t B 1 B 2 (1)
c
(l B 1 D +l B 2 C + Btanβ b −r b1 ω 1 t −∆l)/sinβ b t B 1 B 2 < t ⩽ t B 1 G
l B 2 C /sinβ b t B 1 G < t ⩽ t B 1 H
(l B 1 B 2 + Btanβ b −r b1 ω 1 t)/sinβ b t B 1 H < t ⩽ t B 1 I
式中: ∆l为齿腰分阶位置损失掉的接触线长度, ∆l = 式中: L z (t)为t时刻所有啮合齿对接触线长度之和,
(y +y )m n −(l +l )m n tanα a . n ∑
∗
∗
∗
∗
i
a d a d L z (t) = l (t).
c
假设载荷沿接触线方向均匀分布,则t时刻第i条 i=1
假设t时刻第i条接触线上第j段沿接触线方向到端
接触线上第j段上的载荷为
面的距离为l,如图3所示,主动轮上某一啮合位置的曲
i
T p l (t)
c
i
F (t) = (2)
j
r b1 mL z (t) 率半径可以表示为
N 2 B 1 +r b1 ω 1 t +∆l−lsinβ b 0 ⩽ t ⩽ t B 1 D
0 (0 ⩽ l ⩽ l a )
NaN (l a < l ⩽ l a +l b )
t B 1 D < t ⩽ t B 1 C
(l a +l b < l ⩽ l a +l b +l c )
N 2 B 1 +r b1 ω 1 t +∆l−lsinβ b
(0 ⩽ l ⩽ l a )
N 2 B 1 +r b1 ω 1 t −lsinβ b
i
1 j
R (t) = (3)
NaN (l a < l ⩽ l a +l b )
t B 1 C < t ⩽ t B 1 G
(l a +l b < l ⩽ l a +l b +l c )
N 2 B 1 +r b1 ω 1 t +∆l−lsinβ b
N 2 B 1 +r b1 ω 1 t −lsinβ b (0 ⩽ l ⩽ l a )
t B 1 G < t ⩽ t B 1 H
NaN (l a < l ⩽ l a +l b +l c )
N 2 B 1 +r b1 ω 1 t −lsinβ b t B 1 H < t ⩽ t B 1 I
i
i
R (t) = N 1 N 2 −R (t) (4)
从动轮的曲率半径可以表示为 2j 1j