
Page 89 - 《软件学报》2020年第12期
P. 89
柏梦婷 等:行程时间预测方法研究 3755
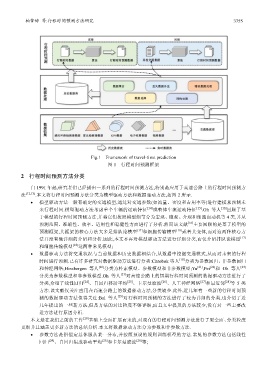
Fig.1 Framework of travel-time prediction
图 1 行程时间预测框架
2 行程时间预测方法分类
自 1991 年起,研究者们已经提出一系列的行程时间预测方法,特别是应用于高速公路上的行程时间预测方
法 [12,13] .本文将行程时间预测方法分类为模型驱动方法和数据驱动方法,如图 2 所示.
• 模型驱动方法一般有确定的交通模型,通过对交通参数(如流量、密度和占用率等)进行建模来预测未
来行程时间.模型驱动方法考虑单个车辆的运动特征 [14] 或整体车流运动特征 [15] .Oh 等人 [16] 回顾了基
于模型的行程时间预测方法,并将它们按照模型细节分为宏观、微观、介观和细胞自动机等 4 类,并从
预测范围、准确性、效率、适用性和稳健性方面进行了分析.然而该文献 [16] 主要回顾的是基于模型的
预测框架,其框架的核心方法大多是排队论模型 [17] 和细胞传输模型 [18] 或者其变体,而对这两种核心方
法并没有做详细的介绍和分析.因此,本文不再对模型驱动方法进行详细分类,而仅介绍排队论模型 [17]
和细胞传输模型 [18] 这两种常见模型;
• 数据驱动方法将交通状况与当前数据和历史数据相结合,从数据中挖掘交通模式,从而对未来的行程
时间进行预测.已有许多研究对数据驱动方法进行分类:Chrobok 等人 [19] 分类为参数回归、非参数回归
和神经网络;Hinsbergen 等人 [20] 分类为朴素模型、参数模型和非参数模型;Yu [21] ,Fei [22] 和 Oh 等人 [23]
分类为参数模型和非参数模型.Oh 等人 [23] 对高速公路上的短期行程时间预测的数据驱动方法进行了
分类,介绍了线性回归 [24] 、自回归移动平均 [25] 、卡尔曼滤波 [26] 、人工神经网络 [27] 和最近邻 [28] 等 5 类
方法.该文献仅关注应用在高速公路上的数据驱动方法,分类较少.此外,近几年有一些新的行程时间预
测的数据驱动方法值得关注:Bai 等人 [29] 对行程时间预测的方法进行了较为详细的分类,也介绍了近
几年提出的一些新方法,但是方法的对比粒度不够详细,而且文中提及的方法较少,没有对一些主要改
进方法进行原因分析.
本文是在我们之前的工作 [29] 基础上全面扩展而来的,对现有的行程时间预测方法进行了更全面、分类粒度
更细并且涵盖更多新方法的总结分析.本文将数据驱动方法分为参数和非参数方法.
• 参数方法是指假定总体服从某一分布,并按照预设的规则训练模型的方法.常见的参数方法包括线性
回归 [24] 、自回归集成移动平均 [25] 和卡尔曼滤波 [26] 等;