
Page 106 - 《真空与低温》2025年第5期
P. 106
王凯民等:惯性传感器电容误差仿真及影响分析 645
是由边缘效应导致的。 护板安装到基板上。
从表中数据可以看出,边缘效应是造成完整模 通过对图 13 的模型仿真分析发现,当电极板
型电容值与理论计算电容值之间的误差值的原因, 的位置误差在 0.1 mm 时,对电极板电容大小的影
而电极框架与其余轴安装基板对目标电容的边缘 响约为 0.02 pF,在可接受范围内。因此最终要求
效应起到约束的作用,使目标电容仿真值与理论计 通过微调,确保同一轴向上 4 块电极板之间的位置
算值的结果更加接近。 误差小于 0.1 mm。
3 实验验证
实验主要目的为对仿真分析所得到的结果进
行验证。根据所创建的模型绘制相应的工程图,并
根据工程图加工产品。而后验收产品、组装产品、
对产品进行实验。
电极板组件主要由基板、绝缘板、测量电极板、
激励电极板、防护板及其他固定和引线结构组成。
电极板由两个 M2.5 螺钉穿过绝缘板通过螺纹结构 图 13 电极板位置精度仿真图
Fig. 13 Simulation diagram of electrode plate position accuracy
与基板结构连接,并在螺钉头部安装绝缘垫与基板
结构绝缘,外部通过防护板对电极板连接螺钉头进 最终调试后的位置误差在 0.05 mm 左右。调
行屏蔽防护,使用 M2.5 螺钉穿过引线保护盖,将防 试后的位置误差如表 4 所列。
表 4 安装后的电极位置范围
Tab. 4 Range of electrode positions after installation
方向 传感电极长边位置范围/mm 传感电极短边位置范围/mm 激励电极长边位置范围/mm 激励电极短边位置范围/mm
X 轴 13.17~13.24 11.60~11.65
Y 轴 11.59~11.65 13.08~13.12 1.66~1.72 13.09~13.14
Z 轴 21.87~21.94 21.00~21.04 20.09~21.05 12.03~12.09
在将电极组装到电极板组件后,进行质量块的 得到只有 Z 轴时的目标电容大小。重复操作,分别
悬吊。将质量块、支撑杆、托盘、反光镜、套管、导 测量只有 X 轴与只有 Y 轴时的目标电容大小。
线以及悬吊结构依次使用导电胶进行连接。在连
接后通过万用表确认导线与质量块的导通程度。
经万用表测量后发现悬丝与质量块之间电阻小于
5 Ω,可以认为悬丝与质量块导通。悬吊后的质量
块实物如图 14 所示。
而后将质量块悬吊于电容极板框架之中。在
组装时,应尽量保证质量块处于电极框架中间位置,
并与电极框架表面相平行。通过 LCR 表对目标电
容进行多次检测。LCR 表的精度在 0.1% 以内,可
以满足于本文电容测试要求。
将 LCR 表开机,预热。选择电容测量后进行
短路校准与开路校准,在校准后对目标电容进行测
量。LCR 表的两个线夹,一个夹在悬吊质量块的
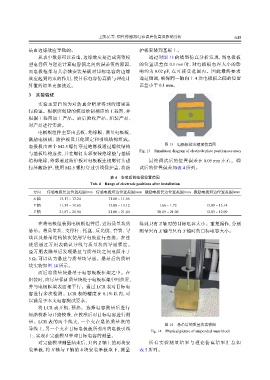
图 14 悬吊后的质量块实物图
导线上,另一个夹在目标电极板所引出的电极引线
Fig. 14 Physical picture of suspended mass block
上,实现在完整模型中对目标电容的测量。
对完整模型测量结束后,只留 Z 轴上的两块安 所有实验测量结果与理论仿真结果汇总如
装基板,将 X 轴与 Y 轴的 4 块安装基板取下,测量 表 5 所列。