
Page 102 - 《真空与低温》2025年第5期
P. 102
王凯民等:惯性传感器电容误差仿真及影响分析 641
为有限元分析软件。由于本文所使用的模型较为 分析的整体模型装配图如图 4 所示。
复杂,使用有限元仿真软件进行仿真分析,不仅能
相对准确地得到电容大小,还能考虑到按公式计算
电容大小时被忽略的误差。在输入模型、材料以
及相关参数后,COMSOL 软件的静电接口可直接
计算电容值并提取电容矩阵,从而直接获得目标电
容的大小。因此,本文选用 COMSOL 软件分析的
方法来计算目标电容的大小。
敏感探头是惯性传感器的重要组成部分,由电
容极板框架与检验质量共同构成。敏感探头需要
对检验质量进行位置识别,以提供卫星纳米精度水
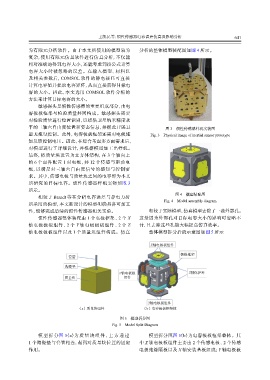
平的三轴六自由度位置和姿态信息,并据此开展卫 图 3 惯性传感器样机实物图
星无拖曳控制。此外,电容极板框架还需对电极施 Fig. 3 Physical image of inertial sensor prototype
加反馈控制电压。因此,在综合考虑多方面需求后,
对模型进行了详细设计,并根据模型加工出样机。
最终,将质量块设置为立方体结构,在 3 个轴向上
的 6 个面各配置 1 对电极,共 12 个传感与驱动电
极,以满足对三轴六自由度信号的感知与控制需
求。其中,传感电极与质量块之间的电容即为本文
所研究的目标电容。惯性传感器样机实物如图 3
所示。
图 4 模型装配图
相较于 Brandt 等在分析电容误差与静电力时
Fig. 4 Model assembly diagram
所采用的模型,本文新设计的模型明确具备可加工
性,能够完成后续的惯性传感器相关实验。 相较于实际模型,仿真模型去除了一些外部孔。
惯性传感器整体装配由 1 个电极框架、2 个 X 这是因为外部孔对目标电容大小的影响可忽略不
轴电极极板组件、2 个 Y 轴电极极板组件、2 个 Z 计,且去除这些孔能大幅提高仿真效率。
轴电极极板组件以及 1 个质量块组件构成。仿真 整体模型拆分后的示意图如图 5 所示
X轴电极板组件
极板框架
套管
陶瓷垫
Z轴电极板 Z轴保护环
质量块 组件
Y轴电极板组件
(a)质量块组件 (b)电容极板框架体
图 5 模型拆分图
Fig. 5 Model Split Diagram
模 型 拆 分图 5(a)为 质 量 块 组 件 , 上 方 通 过 模型拆分图图 5(b)为电容极板框架整体。其
1 个陶瓷垫与套管相连,起到对质量块位置的固定 中 X 轴电极板组件主要由 2 个传感电极、2 个传感
作用。 电极绝缘隔板以及 X 轴安装基板组成;Y 轴电极板