
Page 59 - 《真空与低温》2025年第4期
P. 59
474 真空与低温 第 31 卷 第 4 期
真实环境温度下的工作状态,需要先对其进行稳态 及电磁力作用的综合载荷。根据电磁力方向的不
热分析。将支撑腿的顶部连接板和 4 K 冷板上的 同,FIX_OIS 支撑结构在 Z 方向上可能承受正向或
温度设置为−269.15 ℃,初始温度与支架安装平台 负向的力载荷,并且伴随着两种不同的弯矩组合状
的温度设置为 22 ℃,由于支撑腿结构中存在 G10 态,由这两种力载荷与两种弯矩组合共同形成的
板作为隔热层,温度分布呈现由下至上逐步降低的 四种不同工况。四种工况下 FIX_OIS 支撑结构的
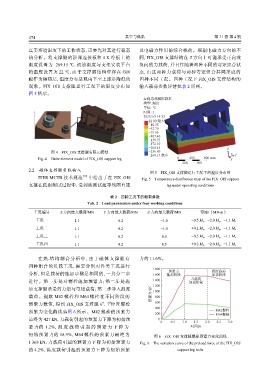
现象。FIX_OIS 支撑腿运行工况下的温度分布如 输入载荷参数详情如表 2 所列。
图 5 所示。
A:稳态热模拟副本
类型: 温度
单位: ℃
时间: 1
2025/1/3 14:32
22.00 最大
−10.35
−42.70
−75.05
−107.40
−139.75
−172.10
−204.45 Z
图 4 FIX_OIS 支撑腿有限元模型 −236.80
−269.15 最小 Y
Fig. 4 Finite element model of FIX_OIS support leg 0 400 800 mm X
200 600
2.2 磁体支撑腿负载输入
图 5 FIX_OIS 支撑腿运行工况下的温度分布图
ITER MCTB 技术规范 [18] 中给出了在 FIX_OIS Fig. 5 Temperature distribution map of the FIX_OIS support
支撑在低温测试过程中,受到被测试超导线圈自重 leg under operating conditions
表 2 四种工况下的载荷参数
Tab. 2 Load parameters under four working conditions
工况编号 X 方向最大载荷/MN Y 方向最大载荷/MN Z 方向最大载荷/MN 弯矩/(MN∙m)
工况一 1.1 0.2 −1.8 −0.5 M x ,−2.0 M y ,−1.1 M z
工况二 1.1 0.2 −1.8 +0.2 M x ,−2.0 M y ,−1.1 M z
工况三 1.1 0.2 0.5 −0.5 M x ,−2.0 M y ,−1.1 M z
工况四 1.1 0.2 0.5 +0.2 M x ,−2.0 M y ,−1.1 M z
在热-结构耦合分析中,由于磁体支撑腿有 力的 11.6%。
四种组合的负载工况,需要分别对各类工况进行
1 800
预紧力
分析,但是载荷的施加步骤是相同的,一共分三步 1 600 施加阶段 温度载荷
加载阶段
力载荷
进行。第一步是对螺栓施加预紧力;第二步是施 1 400 加载阶段
1 200
加支撑腿承受的力矩与弯矩载荷;第三步导入温度 1 000
载荷。提取 M42 螺栓和 M64 螺栓在不同阶段的 预紧力/kN 800
#
#
预紧力数值,得到 FIX_OIS 支撑腿 6 、7 位置螺栓 600
400
预紧力变化曲线如图 6 所示。M42 螺栓的预紧力 M42螺栓
200 M64螺栓
最终为 427 kN,力载荷引起的预紧力下降为初始预 0
0 0.5 1.0 1.5 2.0 2.5 3.0
紧 力的 1.2%, 温 度 载 荷 引 起 的 预 紧 力 下 降 为 时间t/s
初始预紧力的 18.9%,M64 螺栓的预紧力最终为 图 6 FIX_OIS 支撑腿螺栓预紧力变化曲线
1 368 kN,力载荷引起的预紧力下降为初始预紧力 Fig. 6 The variation curve of the preload force of the FIX_OIS
的 4.2%,温度载荷引起的预紧力下降为初始预紧 support leg bolts