
Page 102 - 《真空与低温》2025年第4期
P. 102
胡谦谦等:用于锁模控制的改进型遗传算法仿真研究 517
角度从−90°旋转到 90°,而其他角度在相对最优处 图 5(a)得到的结论相一致,证明了算法的合理性。
固定,白色部分为锁模区域,灰色部分为非锁模区域。 3 控制算法优化
20 1.0 10 1.0 3.1 目标函数的优化
能量 10 0.5 归一化目标 能量 0.5 归一化目标 在遗传算法中,目标函数是核心,定义了想要
0 0 0 0 优化的问题,则目标函数的最大值或最小值代表着
−90 −45 0 45 90 −90 −45 0 45 90 问题的最优解,本文中问题的最优解便是目标函数
α 1 /(°) α 2 /(°)
的最大值。
(a)旋转角α 1 (b)旋转角α 2
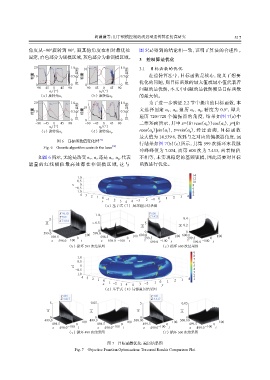
20 1.0 1.0 为了进一步验证 2.2 节中提出的目标函数,本
能量 10 0.5 归一化目标 能量 10 0.5 归一化目标 文选择固定 α 1 、α 2 ,遍历 α 3 、α p ,精度为 0.5°,即共
0 0 0 0 遍历 720×720 个偏振器的角度,结果如图 7(a)中
−90 −45 0 45 90 −90 −45 0 45 90 二维环面所示,其中 x=(R+rcos(α p ))cos(α 3 ),y=[R+
α 3 /(°) α p /(°)
rcos(α p )]sin(α 3 ), z=rsin(α p ), 经 过 查 询 , 目 标 函 数
(c)旋转角α 3 (d)旋转角α p
最大值为 14.539 6,找到与之对应的偏振器角度,运
图 6 目标函数值变化图 [14]
行结果如图 7(b)(c)所示,其第 599 次循环末段脉
Fig. 6 Genetic algorithm controls the laser [14]
冲峰峰值为 7.034,而第 600 次为 7.433,两者幅值
如图 6 所示,无论是改变 α 1 、α 2 还是 α 3 、α p ,代表 不相等,未实现稳定的基频锁模,因此需要对目标
能量的红线幅值最高处都在非锁模区域,这与 函数进行优化。
14
1.0 12
0.5 10
z 0 8
−0.5 6
−1.0 4
4 3 2
2 1 0 1 2 3 4
x −1 −2 −3 −4 −4 −3 −2 −1 0 y
(a)基于式(7) 局部遍历结果图
X 96.88 1.0 Y 600
Y 599 Z 7.433
5 Z 7.034 0.4
|u| |v| 0.5 5 0.2
|u| |v|
0 0 0 0
599.0 100 599.0 600.0 600.0
598.5 0 598.5 0 100 599.5 0 100 599.5 0 100
z 598.0 −100 t z 598.0 −100 t z 599.0 −100 t z 599.0 −100 t
(b)循环 599 次结果图 (c)循环 600 次结果图
9
8
1.0
7
0.5 6
z1 0 5
−0.5 4
−1.0 3 2
4 3
2 1 0 1 2 3 4 1
x −1 −2 −3 −4 −4 −3 −2 −1 0 y
(d)基于式(8)局部遍历结果图
Y 499 Y 500
Z 4.817 Z 4.817
5 0.05 5 0.05
|u| |v| |u| |v|
0 0 0 0
499.0 100 499.0 100 500.00 100 500.00 100
498.5 0 498.5 0 499.5 0 499.5 0
z 498.0 −100 t z 498.0 −100 t z 499.0 −100 t z 499.0 −100 t
(e)循环 499 次结果图 (f)循环 500 次结果图
图 7 目标函数优化:遍历结果图
Fig. 7 Objective Function Optimization: Traversal Results Comparison Plot