
Page 89 - 《中国医疗器械杂志》2026年第1期
P. 89
Chinese Journal of Medical Instrumentation 2026年 第50卷 第1期
设 计 与 制 造
处理模块用于解析上述图像数据信号并处理高清图 口,气路控制单元与控制模块连接,用于控制气泵
像。控制模块用于协调和控制系统工作。四轴机械 的气流输出大小,气泵用于输出高压气体以便清洗
臂模块用于支撑显示模块并支持其4个轴向的运 高清摄像模块的镜头。触摸屏模块与控制模块连
动。显示模块集成于图像处理器,用于显示高清图 接,用于人机交互,实现整机的触摸控制。
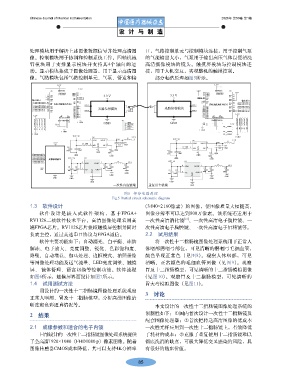
像。气路模块包括气路控制单元、气泵、管道和接 部分电路原理如图5所示。
1.2 V 1.2 V
1.2 V
B7 B6 B5 F5 F6 F7 1.2 V B7 B6 B5 F5 F6 F7 U24
U23 C2 C2
VDD VDD VDD VDD VDD VDD TEST3 B3 B3 TEST3 VDD VDD VDD VDD VDD VDD 1.2 V
F1 TEST2 B2 3.3 V B2 TEST2 CH3+ C1
G1 CH3+ TEST1 3.3 V TEST1 CH3− B1
CH3− D7 DATA_P OUT3_P E7
D1 DO+ E7 DATA_N OUT3_N D7 DO+ E1
输入接口 E1 CH2+ DO− A4 DO− CH2+ D1 输出接口
CH2−
CH2−
2_Sensor_MIPI_DATA1_P B1 DG+ A4 A3 A3 DG+ G1 Sensor2_MIPI_DAT1_P
2_Sensor_MIPI_DATA1_N C1 CH1+ 发射光路预处理芯片 DG− DG− CH1+ F1 Sensor2_MIPI_DAT1_N
CH1−
CH1− DATA_P OUT3_P 接收光路预处理芯片
2_Sensor_MIPI_DATA0_P A2 D2 D2 G3 Sensor2_MIPI_DAT0_P
CH0−
2_Sensor_MIPI_DATA0_N A1 CH0+ VSS D3 D6 光路发射模块 光路接收模块 D3 D6 VSS VSS CH0+ G2 Sensor2_MIPI_DAT0_N
CH0−
VSS
2_Sensor_MIPI_CLK_P G2 VSS E2 E2 VSS VSS CLK+ A1 Sensor2_MIPI_CLK_P
2_Sensor_MIPI_CLK_N G3 CLK+ VSS E6 F2 DATA_N OUT3_N E6 F2 VSS CLK− A2 Sensor2_MIPI_CLK_N
CLK−
VSS
VSS F3 F3 VSS
VSS F4 F4 VSS 1.2 V
1.2 V VSS B4 B4 VSS VSS EHSR Tx/Rx ACT
VSS
EN ACT Tx/Rx FS PS LS GL EHSR HSR VSS C6 C6 VSS ALS GL LS PS OA EN
0.1uF/0402/6.3V 0.1uF/0402/6.3V 0.1uF/0402/6.3V 0.1uF/0402/6.3V 0.1uF/0402/6.3V 1.2 V C7 A7 G7 A6 G5 G6 A5 E4 G4 1_GND GND P1 1 GND GND R73 R72 G4 E4 A5 G6 G5 A6 G7 A7 C7 1.2 V 0.1uF/0402/6.3V 0.1uF/0402/6.3V 0.1uF/0402/6.3V 0.1uF/0402/6.3V 0.1uF/0402/6.3V
VCC 5V
3 2 LED+ R74 OR/0603
C69 C70 C71 C72 C73 4 LED− 1_GND C64 C65 C66 C67 C68
1_GND R77 10K/0603
1_GND R79 10K/0603
VCC_5V 1_GND
U6 3.3 V
1 5 V33A L3 VCC_5V
VIN VOUT U6 L3 3.3 V
3.3 V C13 C14 1 VIN VOUT 5 V33A
R2 100K 3 4 10uF 100nF
EN GND BP C13 C14
C15 R2 100K 3 GND 4 10uF 100nF
C16 2 EN BP
10UF 100nF C17 GND C15
GND 10nF C16 2 C17
2_Sensor_MIPI_DATA1_P 10UF 100nF GND
2_Sensor_MIPI_DATA1_N GND GND GND 10nF
2_Sensor_MIPI_DATA0_P VCC_5V U5 GND
2_Sensor_MIPI_DATA0_N 超微摄像模组 GND
2_Sensor_MIPI_CLK_P 4 1 L2 1.2 V VCC_5V U5
VDD VOUT
2_Sensor_MIPI_CLK_N
C8 C9 C10 4 1 L2 1.2 V
C11 C12 VDD VOUT
LED+ 3 2 10uF 100nF 100nF C8 C9 C10
LED− CE GND
10uF 100nF PAD C11 C12 3 2 10uF 100nF 100nF
GND 10uF 100nF CE GND
GND PAD
5 GND
GND GND GND
5
GND GND
一次性内窥镜端 重复用主机端 GND
图5 部分电路原理
Fig.5 Partial circuit schematic diagram
1.3 软件设计 ( 3 840×2 160像素)的图像,使图像质量大幅提高,
软件设计是嵌入式软件架构,基于FPGA+ 图像分辨率可以达到800万像素。该系统还适用于
RV1126二核软件技术平台。高清图像处理采用高 一次性高清消化镜 、一次性高清电子腹腔镜、一
[21]
端FPGA芯片。RV1126芯片兼顾触摸屏控制并同时 次性高清电子胸腔镜、一次性高清电子妇科镜等。
负责主控,通过高速串口协议与FPGA通信。 2.2 试用结果
软件主要功能如下:自动消光、白平衡、冻结 将一次性十二指肠镜图像处理系统用于正常人
解冻、电子放大、亮度调整、锐化、色彩饱和度、 体咽部腭咽弓部位,可见清晰的腭咽弓毛细血管,
降噪、自动增益、伽马处理、边框模式、拍照录像 颜色呈现正常色(见图8)。观察人体咽部,可见
等图像处理功能及送气流量、LED亮度调整、触摸 清晰、正常颜色的毛细血管图像(见图9)。观察
屏、 镜体管理、语言切换等控制功能。软件流程 胃及十二指肠模型,可见清晰的十二指肠模拟图像
如图6所示,触摸屏界面设计如图7所示。 ( 见图10)。观察胃及十二指肠模型,可见清晰的
1.4 试用测试方法 胃大弯模拟图像(见图11)。
用设计的一次性十二指肠镜图像处理系统观察
3 讨论
正常人咽部、胃及十二指肠模型,分析高清图像清
晰度和色彩逼真情况等。 本文设计的一次性十二指肠镜图像处理系统的
2 结果 创新性如下:①国内首次设计一次性十二指肠镜及
配套图像处理器;②首次把传送高清图像的低成本
2.1 成像参数和适合的电子内镜 一次性光纤应用到一次性十二指肠镜上,有效降低
目前设计的一次性十二指肠镜图像处理系统提供 了耗材的成本;③克服了重复使用十二指肠镜难以
了全高清1920×1 080(FHD1080 p)像素图像。随着 彻底洗消的缺点,可极大降低交叉感染的风险,具
图像传感器CMOS成本降低,其可以支持4K分辨率 有很好的临床价值。
85