
Page 84 - 《中国医疗器械杂志》2026年第1期
P. 84
Chinese Journal of Medical Instrumentation 2026年 第50卷 第1期
临 床 医 学 工 程
2 结果 眼观察法用时增加到放射源重复误差分析用时约
为10 min,放射源累积误差分析用时约为20 min,
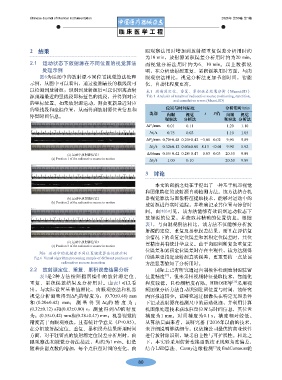
2.1 运动状态下放射源在不同位置的视觉算法 而视觉分析法用时约为6、10 min。以上数据说
处理示例 明,在分析放射源重复、累积误差用时方面,与肉
图6为运动中的放射源不同位置视觉算法处理 眼观察法相比,视觉分析法更加节省时间,智能
示例,从图中可以看出,通过检测最长的横线段可 化、自动化程度更高。
以检测到放射源;识别到放射源后可以识别离放射 表1 放射源定位、重复、累积误差结果分析(Mean±SD)
源顶端最近的竖线段即标蓝色的线段,并得到对应 Tab.1 Analysis of results of radioactive source positioning, repetition,
的坐标位置。如果放射源运动,则会更新最近对应 and cumulative errors (Mean±SD)
的竖线段和坐标位置,从而得到放射源位置信息和 位置与时间精度 分析用时/min
类别 肉眼 视觉 t P值 肉眼 视觉
停留时间信息。
观察法 分析法 观察法 分析法
∆P 1 /mm 0.01 0.11 1.20 1.10
∆t 1 /s 0.75 0.03 1.10 1.05
∆P 2 /mm 0.70±0.48 0.20±0.42 −3.00 0.02 9.90 5.89
∆t 2 /s 0.32±0.12 0.03±0.00 8.13 <0.01 9.90 5.92
(a) 运动中放射源位置1 ∆D/mm 0.55±0.42 0.28±0.47 −0.63 0.03 20.50 9.89
(a) Position 1 of the radioactive source in motion ∆t 3 /s 1.00 0.10 20.50 9.89
3 讨论
本文的创新之处在于提出了一种基于机器视觉
和图像特征的放射源自动检测方法。该方法结合机
(b) 运动中放射源位置2 器视觉算法与图像特征提取技术,能够对运动中的
(b) Position 2 of the radioactive source in motion
放射源进行实时追踪,并准确记录其位置与停留时
间。由图6可见,该方法能够有效识别运动状态下
放射源的位置,并获取其精确的位置信息。根据
表1,与肉眼观察法相比,该方法不仅能够分析放
射源的定位、重复及累积误差结果,而且在评估复
杂情况下的重复定位误差和累积定位误差时,其位
(c) 运动中放射源位置3 置精度具有统计学意义。由于肉眼判断复杂重复定
(c) Position 3 of the radioactive source in motion
位误差和累积定位误差时存在主观性,该方法测得
图6 运动中的放射源不同位置视觉算法处理示例
Fig.6 Visual algorithm processing sample of different positions of 的误差更接近放射源真实误差,更重要的一点是该
radioactive sources in motion
方法显著缩短了分析用时。
2.2 放射源定位、重复、累积误差结果分析 国际上已有研究通过自制模体检测放射源驻留
[15]
表1是2种方法按照指南操作的放射源定位、 位置精度 ,但未采用视频特征提取技术,智能化
[16]
重复、累积误差结果及分析用时。由表1可以看 程度较低,且检测精度有限。HIROSE等 采用视
出,与实际设置基准值相比,肉眼观察法和机器 频图像分析方法自动识别驻留位置与时间,该研究
视觉分析测量得到∆P 的精度为:(0.70±0.48) mm 内容报道较少。该研究通过摄像头在特定光照条件
2
和 (0.20±0.42) mm; 测 量 得 到 ∆t 的 精 度 为 : 下记录放射源在检测尺中的运动轨迹,并利用计算
2
(0.32±0.12) s和(0.03±0.00) s;测量得到∆D的精度 机图像处理技术获取驻留位置与时间信息,其位置
为:(0.55±0.42) mm和(0.28±0.47) mm;机器视觉的 精度为1 mm,时间精度为0.1 s,精度相对较低。
精度高于肉眼观察法,且有统计学意义(P<0.05)。 从算法层面来看,该研究基于2016年以前的技术,
在分析放射源定位、重复、累积误差结果所用时间 未详细说明算法细节,仅依赖公司提供的商业软件
方面,对于驻留点的放射源定位误差分析用时,肉 进行放射源识别,缺乏自主性与可扩展性。相比之
眼观察法和视觉分析法接近,均约为1 min。但是 下,本实验采用仿射变换函数校正视频角度偏差,
随着驻留点数的增加,每个点驻留时间的变化,肉 结合LSD算法、Canny边缘检测 及findContours轮
[9]
80