
Page 9 - 《振动工程学报》2026年第5期
P. 9
第 5 期 朱 锐,等:时变特性驱动的模态参数跟踪方法 1213
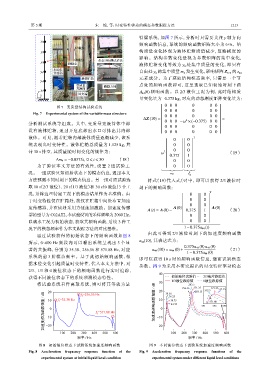
满水 臂梁系统,如图 7 所示,分析时只需要关注 y 轴方向
y 6
频响函数信息,系统的频响函数矩阵大小为 6×6。结
2/3液位
构质量变化体现为液体贮箱质量减少,忽略刚度的
y 5
影响。结构参数变化量视为参数矩阵的集中变化,
1/3液位 动态分析测试系统
激励点 液体贮箱变化等效为 y 4 处集中质量的变化,即只有
y 4
加速度 自由处 y 4 的集中质量 m 4 发生变化,影响矩阵 Z 6× 的
y 3 传感器 6 z 44
液体贮箱 元素成分。为了获取结构模态频率,只需要一个节
y 2
变质量 激励力锤 点处的频响函数即可,这里选取已知初始时刻下的
充液筒
y y 1 A 44 (0) 频响函数。以 2/3 液位工况为例,此时结构质
x 固支端
o 量变化量为−0.375 kg,对应的动态刚度矩阵变化量为:
图 7 变质量结构试验系统 0 0 0 0 0 0
0 0 0 0 0 0
Fig. 7 Experimental system of the variable-mass structure
0 0 0 0 0 0
∆Z (10) = 2 =
0 0 0 −ω ×(−0.375) 0 0
分析测试系统等组成。其中,变质量充液筒体中部
0 0 0 0
0 0
设有液体贮箱,通过开启底部出水口可排出其内部 0 0 0 0 0 0
液体。可见,随着贮箱内部液体质量逐渐减少,该系 T
0 0
统表现出时变特性。液体贮箱总质量为 1.125 kg,共 0
0
0
计 30 s 排空,其质量随时间变化的规律为: ω 0 (19)
2
0.375 1
∆m 4 = −0.0375t, 0 ⩽ t ⩽ 30 (18) 0
0
为了验证本文方法的有效性,设置 2 组试验工 0 0
| {z }| {z }
况。一组试验只知初始状态下的模态信息,通过本文 u 10 v T
10
方法预测不同时刻下的模态信息。另一组对照试验选 将式(19)代入式(9)中,即可以获得 2/3 液位时
取 10 s(2/3 液位)、20 s(1/3 液位)和 30 s(0 液位)3 个工 刻下的频响函数:
况,并将这些特定工况下的模态结果作为基准值。由 0 T
0
于时变特性仅在贮箱处,故仅在贮箱中间处布置加速 0 0
0
0
度传感器,并在该处采用力锤施加激励。加速度传感 A(0) A(0)
A(t) = A(0)− 0.375 1 (20)
器的型号为 C02AT2,本试验设置的采样频率为 2000 Hz。 0
0
以满水工况为初始状态,获取其频响函数,后续 3 种工 0 0
况下的模态频率作为本文跟踪方法的对比基准。 1−0.375a 44 (t)
由此可得到 2/3 液位时刻下的加速度频响函数
通过试验获得的初始状态下的频响函数如图 8
a 44 (10),其表达式为:
所示,0~600 Hz 频段内可以看出系统呈现出 3 个显
0.375a 44 (0)a 44 (0)
著的共振峰,分别为 35.38、256.56 和 571.88 Hz,对应 a 44 (10) = a 44 (0)+ (21)
1−0.375a 44 (0)
系统的前 3 阶模态频率。基于此初始频响函数,根
即可以获得 10 s 时的频响函数信息,继而识别模态
据水位变化引起质量时变特性,代入本文方法中,对
参数。图 9 为采用本研究提出的时变特征驱动模态
2/3、1/3 和 0 液位状态下的频响函数进行实时追踪,
40
获得不同液位状态下的系统预测模态特性。 初始液位试验值 2/3液位跟踪值
将试验系统看作离散系统,则可将其等效为悬 30 1/3液位跟踪值 0液位跟踪值
263.5
20 256.56 271.25 572.5 573.13 573.75
20 f 1 =35.38 Hz f 2 =256.56 Hz 10 35.38 38.75 283.13 571.88
加速度频响函数幅值 / dB −10 0 f 3 =571.88 Hz 加速度频响函数幅值 / dB −10 0 43.75 571 573 575
36.25
10
−20
100 200 300 400 500 600 −20 100 200 300 400 500 600
频率 / Hz 频率 / Hz
图 8 初始液位状态下试验系统加速度频响函数 图 9 不同液位状态下试验系统加速度频响函数
Fig. 8 Acceleration frequency response function of the Fig. 9 Acceleration frequency response functions of the
experimental system at initial liquid level condition experimental system under different liquid level conditions