
Page 7 - 《振动工程学报》2026年第5期
P. 7
第 5 期 朱 锐,等:时变特性驱动的模态参数跟踪方法 1211
T 开始
−1 H 0 u t v H 0
t
H(t) = Z(t) = H 0 − (8)
T
1+v H 0 u t
t
根据位移频响函数与加速度频响函数的关系,在 确定变化位置 时变特性监测
式(8)两边同乘−ω ,则 t 时刻的加速度频响函数信息为: 开展初始状态 量化时变特性变化量
2
模态试验 如∆M(t ∆ K(t)∆ (t)、∆
T
( ) ( ) H 0 u t v H 0
2
A(t) = −ω H 0 − −ω 2 t =
T
1+v H 0 u t 获取局部 确定动态刚度矩阵
t
2 T 频响函数 变化量
ω H 0 u t v H 0
t
A 0 + (9)
T
1+v H 0 u t
t
基于Sherman‐Morrison
式中,A 0 为系统初始加速度频响函数矩阵。 公式快速更新实时FRF
通过上述方法建立时变特性与频响函数变化量
代入传统模态识别
的映射关系,需要注意:(1)在特定情况下,刚度变化
已知时,如结构材料特性随着温度变化而发生变化, 模态信息
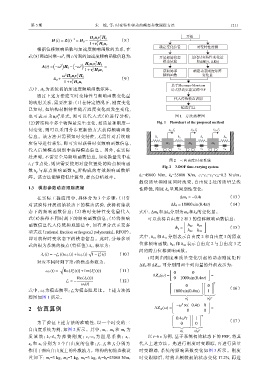
也可表示为 u t v 形式,则可以代入式(8)进行分析; 图 1 方法流程图
T
t
(2)若结构中多个物理量发生变化,如质量和刚度一 Fig. 1 Flowchart of the proposed method
同变化,则可以采用分步更新的方式获得频响函数 x 1 , f 1 x 2 , f 2 x 3 , f 3
信息。该方法只需预知时变特性,无需针对后续响 k 1 k 2 k 3 k 4
应信号进行采集,即可实时获得时变频响函数信息, m 1 m 2 m 3
代入后续模态识别中获得模态信息。另外,在实际 c 1 c 2 c 3 c 4
处理时,不需要全局频响函数信息,如变换量集中在
图 2 三自由度时变系统
i,j 节点处,则只需要使用对应位置处的跨点频响函
Fig. 2 3-DOF time-varying system
数 h i 与原点频响函数 h i 所构成的有效频响函数矩
j
i
k 2 =45000 N/m, k 4 =35000 N/m, c 1 =c 2 =c 3 =c 4 =0.2 N·s/m。
阵。该方法能够降低计算量,提高分析效率。
假设质量和刚度同时改变,自由度 2 处的质量呈线
1.3 模态参数动态跟踪流程 性降低,刚度 k 4 呈现周期性变化:
在实际工程应用中,具体分为 3 个步骤:(1)针 ∆m 2 = −0.4t (13)
对试验件开展初始状态下的模态试验,获得初始状 ∆k 4 = 10000sin(0.4πt) (14)
态下的频响函数信息;(2)将时变特性变化量代入 式中, ∆m 2 和 ∆k 4 分别为 m 2 和 的变化量。
k 4
式(8)获得不同时刻下的频响函数信息;(3)将频响 可以获得自由度 2 和 3 的位移频响函数信息:
[ ]
函数信息代入传统频域算法中,如有理分式正交多 h 22 h 23
h a = (15)
项式法(rational fraction orthogonal polynomial,RFOP), h 32 h 33
3
即可获得时变状态下的模态信息。此时,分母多项 式中,h 2 和 2 h 3 分别表示自由度 2 和自由度 3 的原点
2
式的根为系统的极点(特征值) λ r ,表示为: 位移频响函数;h 2 和 3 h 3 表示自由度 2 与自由度 3 之
间的跨点位移频响函数。
√
2
λ r (t) = −ζ r (t)ω r (t)+iω r (t) 1−ζ (t) (10)
r
t 时刻由刚度和质量变化引起的动态刚度矩阵
对应不同时刻下第 r阶模态参数为:
√ ∆Z k 和 ∆Z m ,可分别用两个列向量的外积表示为:
( ) ( )
2
2
ω r (t) = Re λ (t) +Im λ (t) (11) [ 0 0 ]
r
r
∆Z k (ω) = =
Re(λ r (t)) 0 1000sin(0.4πt)
ζ r = − (12)
ω r (t) [ ][ ] T
0 0 (16)
式中, ω r 为模态频率; 为模态阻尼比。上述方法流 1000sin(0.4πt) 1
ζ r
程图如图 1 所示。 | {z }| {z }
t
t
u
(v ) T
k k
[ ]
2
−ω ×(−0.4t) 0
2 仿 真 算 例 ∆Z m (ω) = 0 0 =
[ 2 ][ ] T
0.4ω t 1
为了验证上述方法的准确性,以一个时变的三 0 0 (17)
自由度系统为例,如图 2 所示。其中,m 1 、m 2 和 m 3 为 | {z }| {z }
t
u m t (v m ) T
质 量 块; k 1 ~k 4 为 弹 簧 刚 度 ; c 1 ~c 4 为 阻 尼 系 数 ; x 1 、 以 t=6 s 为例,基于系统初始状态下的 FRF,将其
x 2 和 x 3 分别为 3 个自由度的位移;f 1 、f 2 和 f 3 分别为 代入上述方法。先进行刚度时变跟踪,再进行质量
作用于相应自由度上的外激励力。结构的初始参数设 时变跟踪,系统的频响函数变化如图 3 所示。刚度
置 如 下: m 1 =3 kg, m 2 =7 kg, m 3 =3 kg, k 1 =k 3 =25000 N/m, 时变跟踪后,结构基频较初始状态变化 17.2%,再进