
Page 8 - 《振动工程学报》2026年第5期
P. 8
1212 振 动 工 程 学 报 第 39 卷
理论值 刚度时变后频响函数 捕捉模态变化特性,验证了本文方法的有效性。
初始频响函数 质量时变后频响函数
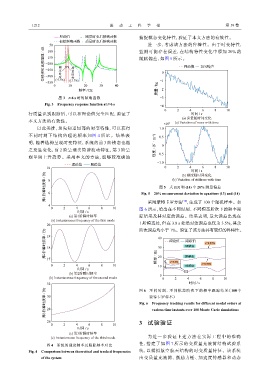
进一步,考虑该方法的鲁棒性。由于时变特性,
−50 监测可能存在误差,在结构特性变化中添加 20% 的
位移频响函数幅值 / dB −150 刚 质 随机偏差,如图 0 5 所示。 20%噪声
−100
−200
理论值
−250
度
量
时
时
−300
变
变
−350 (17.2%) (13.7%)
0 10 20 30 40 质量 / kg −1
频率 / Hz −2
图 3 t=6 s 时的频响函数 −3
Fig. 3 Frequency response function at t=6 s −4
0 2 4 6 8 10
行质量识别跟踪后,可以和理论值完全匹配,验证了 时间 / s
(a) 质量随时间变化
本文方法的有效性。
×10 4 (a) Variation of mass with time
以此类推,预先知道局部的时变特性,可以获得 1.0
不同时刻下结构的理论频率如图 4 所示。结果表 0.5
明,随着结构呈现时变特征,系统的前 3 阶模态也随 刚度 / (N·m −1 ) 0
之发生变化,前 2 阶呈现类简谐波动特征,第 3 阶呈 −0.5
现单调上升趋势。采用本文的方法,能够较准确地
−1.0
理论值 跟踪值
10 0 2 4 6 8 10
时间 / s
第1阶瞬时频率 / Hz 8 6 Fig. 5 20% measurement deviation in equations (13) and (14)
(b) 刚度随时间变化
(b) Variation of stiffness with time
测量偏差
(14) 中
图 5 式
(13) 和
20%
4 采用蒙特卡罗方法 [18] ,生成了 100 个随机样本。如
0 2 4 6 8 10 图 6 所示,给出在不同时刻、不同模态阶次下的频率跟
时间 / s
(a) 第1阶瞬时频率 踪结果及其对应的误差。结果表明,最大误差出现在
(a) Instantaneous frequency of the first mode
3.5%,其余
3.8 s 处绝对值误差也仅为
阶模态处,但在
20 1 阶次误差均小于 1%。验证了该方法具有较好的鲁棒性。
第2阶瞬时频率 / Hz 19 40 理论值 跟踪值 e=0.59%
3阶模态
30
18
17 频率 / Hz 20 5 e=3.5% 2阶模态
0 2 4 6 8 10 10 4 1阶模态 e=0.78%
时间 / s
(b) 第2阶瞬时频率
0
(b) Instantaneous frequency of the second mode 0 2 4 6 8 10
32 时间 / s
图 6 不 同 时 刻 、 不 同 模 态 阶 次 下 的 频 率 跟 踪 结 果 ( 100 个
第3阶瞬时频率 / Hz 30 Fig. 6 Frequency tracking results for different modal orders at
蒙特卡罗样本)
28
various time instants over 100 Monte Carlo simulations
26 3 试 验 验 证
0 2 4 6 8 10
时间 / s
(c) 第3阶瞬时频率
(c) Instantaneous frequency of the third mode 为进一步验证上述方法在实际工程中的准确
性,搭建了如图 7 所示的变质量充液筒结构试验系
图 4 系统的理论频率及跟踪频率对比
统,以模拟航空航天结构的时变质量特征。该系统
Fig. 4 Comparison between theoretical and tracked frequencies
of the system 由变质量充液筒、激励力锤、加速度传感器和动态