
Page 77 - 《振动工程学报》2026年第5期
P. 77
第 5 期 陈 阳,等:融合多模态转子振动特性的电机轴承故障定位与诊断方法 1281
384
43
18 20 20 25 5 5 25 27 15
20 40 142 40
1 2 3 4 5 6 7 8 9 10 11 12 13 14
ϕ65 ϕ50 ϕ19
ϕ14 ϕ15
驱动端 轴承1 轴承2 非驱动端
(DE) (DE-B1) 电机转子 (DE-B2) (NDE)
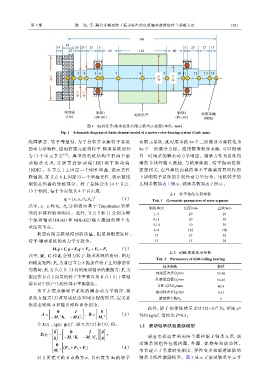
图 1 电机转子-轴承系统有限元模型示意图(单位:mm)
Fig. 1 Schematic diagram of finite element model of a motor rotor-bearing system (Unit: mm)
线圈铁芯、转子等组件,为了分析并求解转子系统 有限元系统,此时原本的 4n 个二阶微分方程转化为
的动力学特性,应用有限元法将转子-轴承系统划分 8n 个一阶微分方程。应用数值积分求解,可以得到
为 13 个单元节点 [27] 。典型的电机结构中有两个滚 每一时间步的瞬态动力学响应。轴承力作为系统内
动 轴 承 支 承, 分 别 靠 近 驱 动 端 ( DE) 和 非 驱 动 端 部的非线性输入激励,与轴承缺陷、转子振动位移
(NDE)。在节点 1 上固定一个刚性圆盘,表示柔性 紧密相关,在外部径向载荷和不平衡载荷共同作用
联轴器,在节点 8 上固定另一个圆盘元件,表示被线 下影响转子系统的非线性动力学行为。电机转子的
圈铁芯包裹的转轴部分。转子总体分为 14 个节点、 几何参数如表 1 所示,轴承参数如表 2 所示。
13 个轴段,每个节点包含 4 个自由度:
表 1 转子轴段几何参数
q i = [x i ,y i ,θ xi ,θ yi ] T (1) Tab. 1 Geometric parameters of rotor segment
式中,x i 、y i 和 θ xi 、θ y 分别表示基于 Timoshenko 梁单
i
轴段单元 长度/mm 直径/mm
元的平移和转动响应。此外,节点 5 和 11 分别为两 1~3 20 28
个滚动轴承(DE-B1 和 NDE-B2)输入激励的两个支 4,11 20 30
5,10 10 30
承位置节点。
6~9 142 100
利用有限元模型得到的质量、阻尼和刚度矩阵, 12 27 28
转子-轴承系统的动力学方程为: 13 15 28
(2)
M r ¨ q+C r ˙ q+ K r q = F w + F b + F e
表 2 6206 滚动轴承参数
式中,M r 、C r 和 K r 分别为转子-轴承系统的质量、阻尼
Tab. 2 Parameters of 6206 rolling bearing
和刚度矩阵;F w 为通过节点 8 施加在转子上的静态径
轴承参数 数值
向载荷;F b 为节点 5、11 处的滚动轴承的激励力;F e 为
内滚道直径D i /mm 37.48
假定在节点 5 设置的转子不平衡以及节点 1 由于联轴
外滚道直径D o /mm 56.45
器不对中所产生的外部不平衡载荷。
节距直径D m /mm 46.8
为了方便求解转子系统的瞬态动力学响应,将 滚动体直径D b /mm 9.51
系统方程式(2)改写成状态空间方程的形式,定义系 滚动体个数N b 9
统状态矩阵 A 和输出矩阵 B 分别为:
此外,转子的弹性模量 E=2.321×10 Pa,密度 ρ=
11
[ ] [ ]
0 I 0
A = −1 ,B = −1 (3) 7850 kg/m ,泊松比 P=0.3。
3
−M K r −M r C r M
r r
令 X(t) = [ ˙ q(t) ¨ q(t)] ,联立式(2)和(3),得: 1.2 滚动轴承缺陷激励模型
T
[ ]
˙ q
˙
X(t) = = 0 I q
+
−1 −1 感应电机通常采用两个圆柱滚子轴承支承,滚
¨ q −M K r −M C r ˙ q
r
r
[ ] 动轴承的组件包括内圈、外圈、保持架和滚动体。
0 (4)
M −1 (F w + F b + F e ) 本节建立了考虑时变刚度、弹性变形和滚道缺陷的
r
对于所建立的节点数为 n、自由度为 4n 的转子 轴承非线性激励模型。图 2 显示了滚动轴承单元节