
Page 328 - 《振动工程学报》2025年第11期
P. 328
2786 振 动 工 程 学 报 第 38 卷
Wilson 平均法 SW32 ρ ∞ =0 Wilson平均法 OSS21 ρ ∞ =0
Wilson-θ SW32 ρ ∞ =0.5 Wilson-θ OSS21 ρ ∞ =0.5
SW32 ρ ∞ =1.0 OSS21* ρ ∞ =0 OSS21 ρ ∞ =1.0 OSS21* ρ ∞ =0
OSS21* ρ ∞ =1.0 OSS21* ρ ∞ =0.5 OSS21* ρ ∞ =1.0 OSS21* ρ ∞ =0.5
1.2 800
600
1.0
400
0.8 200
谱半径 0.6 位移u n / m −200 0
0.4 −400
0.2 −600
−800
−1000
0
10 −2 10 −1 10 0 10 1 10 2 10 3 10 4 0 0.5 1.0 1.5 2.0 2.5 3.0 3.5 4.0 4.5 5.0
Ω 时间 / s
(a) 谱半径 (a) 位移
(a) Spectral radii (a) Displacements
1.2 20
15
1.0 10
数值阻尼率 0.6 速度u n ·ω −1 / m −10 5 0
0.8
−5
0.4
0.2
0 −15
−20
−0.2 0 0.5 1.0 1.5 2.0 2.5 3.0 3.5 4.0 4.5 5.0
10 −2 10 −1 10 0 10 1 10 2 10 3 10 4 时间 / s
Ω (b) 速度
(b) 数值阻尼率 (b) Velocities
(b) Numerical damping ratios
1.0 Fig. 2 Overshooting responses of implicit algorithms
图 2 隐式算法的超调响应
0.8
相对周期误差 0.6 GSSI*(0,1)
ξ=0.2 ξ=0.6 ξ=0.9
GSSI(0,1)
0.4
0.2
1.0
0 1.2
0 0.5 1.0 1.5 2.0 2.5 3.0 0.8
Ω
(c) 相对周期误差 谱半径 0.6
(c) Relative period errors 0.4
0.2
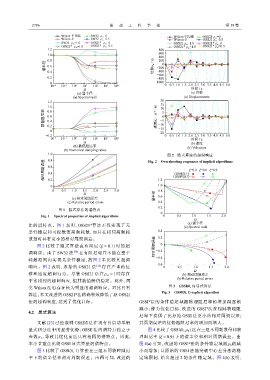
图 1 隐式算法的谱特点
0
Fig. 1 Spectral properties of implicit algorithms 0 0.5 1.0 1.5 2.0
Ω
(a) 谱半径
法的谱特点。图 1 表明,OSS21*算法不仅实现了无
(a) Spectral radii
条件稳定和可控数值高频耗散,而且在相同高频耗 0.4
散量时具有更小的相对周期误差。 0.2
图 2 比较了隐式算法在有阻尼 ( ξ = 0.1) 时的超 相对周期误差 0
调响应。由于 SW32 法 [30] 在有阻尼时并不能在整个 −0.2
耗散范围内实现无条件稳定,故图 2 未比较其超调 −0.4
−0.6
响应。图 2 表明,原始的 OSS21 法 [12] 存在严重的位 0 0.5 1.0 1.5 2.0
Ω
移和速度超调行为。尽管 OSS21 法在 ρ ∞ = 1时存在 (b) 相对周期误差
非常剧烈的超调响应,但其数值解仍稳定。此外,两 (b) Relative period errors
类 Wilson 法也存在较为明显的超调响应。对比已有 图 3 GSSI(0, 1) 显式算法
Fig. 3 GSSI(0, 1) explicit algorithm
算法,本文改进的 OSS21*法的确有效降低了原 OSS21
法的超调响应,达到了优化目标。 GSSI*法的条件稳定域随物理阻尼率的增加而逐渐
减小;作为优化目标,改进的 GSSI*法在相同物理阻
4.2 显式算法
尼率下提供了比原始 GSSI 法更小的相对周期误差;
文献 [23] 已经表明 GSSE/I 法在现有自启动单解 其周期误差的优势随阻尼率的增加而增大。
显式积分法中的显著优势;GSSE 法的谱特点独立于 图 4 比较了 GSSI(0, ρ b ) 法在三组不同耗散量和物
参数 α 1 ,导致其优化前后具有相同的谱特点。因此, 理阻尼率 ( ξ = 0.9) 下的谱半径和相对周期误差。由
本小节重点比较 GSSI 显式算法的谱特点。 图 4(a) 可知,改进的 GSSI*法的条件稳定域随 ρ b 的减
图 3 比较了 GSSI(0, 1) 算法在三组不同物理阻尼 小而增加;且原始的 GSSI 法能突破中心差分法的稳
率下的谱半径和相对周期误差。由图可知,改进的 定域限制,给出超过 2 的条件稳定域。图 4(b) 表明,