
Page 280 - 《振动工程学报》2025年第11期
P. 280
2738 振 动 工 程 学 报 第 38 卷
可以看出,分段的 IPAA 法辨识的 ARMA 模型参 A 为系统传递函数的分母多项式,与系统的极点相
数误差更小,更能拟合真实输出曲线。因此,分段的 关;B 为系统传递函数的分子多项式,与系统的零点
IPAA 算法辨识的压电智能叶片 ARMA 模型参数更 相关。
加精确。 Q(z )为 Youla-Kučera 参数化中的 Q 多项式,可
−1
以是 FIR 滤波器也可以是 IIR 滤波器。在此选用 FIR
2 振 动 主 动 控 制 系 统 设 计 滤波器的形式, Q(z )可以表示为:
−1
−1 −1 −2 −n Q (21)
z
Q(z ) = q 0 +q 1 z +q 2 z +···+q n Q
2.1 考虑内部正反馈的自适应振动主动控制系统 式中,n Q 表示 FIR 滤波器的阶数。
使用 Youla-Kučera 参数化后,滤波器 Q(z )和中
−1
在以压电智能结构为代表的传感-控制一体化系
央 控 制 器 N 0 (z )共 同 构 成 了 一 个 新 的 前 馈 控 制 器
−1
统中,控制作动器的控制作用会对参考传感器采集
K(z ),可以表示为:
−1
到的振动参考信号产生结构内部正反馈,与激振信 R(z )
−1
−1
号叠加形成耦合回路,导致控制器的性能下降甚至 K(z ) = S (z ) (22)
−1
失效。Youla-Kučera 参数化在前馈控制中具有独特 其中,控制器多项式 R(z )和 S (z )具有以下形式:
−1
−1
的解耦机理与鲁棒性优势,通过合理选择 Q 参数可 R(z ) = R 0 (z )+ A(z )Q(z ) (23)
−1
−1
−1
−1
在频域上有效抑制控制信号对参考通道的耦合干 −1 −1 −d −1 −1
S (z ) = S 0 (z )−z B(z )Q(z ) (24)
扰,实现前馈控制路径与反馈抑制路径的解耦。 式中,上标 d 表示被控对象的时延(时间延迟)步数。
采用 Youla-Kučera 参数化方法设计前馈控制器, 基于 Youla-Kučera 参数化方法所得的闭环特征多
将自适应滤波器和中央鲁棒控制器进行结合,既可 项式 P(z )是一个贝祖多项式,该多项式可以表示为:
−1
以保证内部环路的稳定性,又可以降低振动主动控
−1
−1
−1
−1
−1
P(z ) = A(z )S 0 (z )− B(z )R 0 (z ) (25)
制的误差 [38] 。
通过对该特征多项式 P(z )进行极点配置,然后
−1
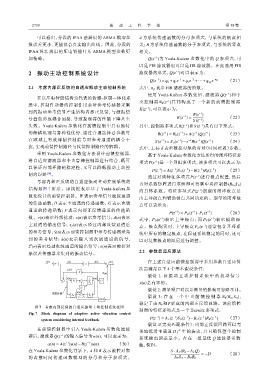
考虑内部正反馈的自适应振动主动控制系统的
再对系数矩阵进行求解即可得到中央控制器 (R 0 ,S 0 )
结构如图 7 所示。虚线框表示基于 Youla-Kučera 参
的具体系数。特征多项式 P(z )期望的闭环极点是
−1
数化设计的前馈控制器。W 表示参考信号滤波通道
由主导极点和辅助极点共同决定的。期望的闭环极
的传递函数;D 表示主通道的传递函数; G 表示次级
点可以表示为:
通道的传递函数;F 表示内部正反馈通道的传递函 −1 −1 −1
P(z ) = P D (z )· P F (z ) (26)
数。 r(n)表示外部扰动; x(n)表示参考信号; d(n)表示 式 中, P D (z )表 示 主 导 极 点 ; 而 P F (z )表 示 辅 助 极
−1
−1
主通道的输出信号; x f (n)表示经过内部反馈通道后 点。极点配置时,主导极点 P D (z )通常包含开环系
−1
的参考信号; ˆ y(n)表示前馈控制器中参考传感器采集 统中所有的稳定极点,在保证系统稳定的同时,还可
到 的 参 考 信 号; ˆ u(n)表 示 输 入 到 次 级 通 道 的 信 号 , 以对复数极点的阻尼进行调整。
ˆ z (n)表示经过次级通道的输出信号; e(n)表示被控对
0
2.2 参数自适应算法
象误差传感器采集到的振动信号。
r(n) x(n) d(n) + e(n) 在上述自适应前馈控制器中采用参数自适应算
W D
+ 法需满足以下 个基本假设条件:
x f (n) 4
F
ˆ z 0 (n)
假设 1: 该 振 动 主 动 控 制 系 统 中 的 扰 动 信 号
+ ˆ y(n) 1 ˆ u(n)
R 0 G
+ + + S 0 x(n)是有界的。
ˆ Q
假设 2:测量噪声对误差测量的影响可忽略不计。
α(n)
前馈补偿
− + 假设 3: 存 在 一 个 中 央 前 馈 控 制 器 N 0 (R 0 ,S 0 ),
A F B F
RLS
稳定了由 N 0 和 形成的内部正反馈回路。该前馈控
F
图 7 考虑内部反馈的自适应振动主动控制系统框图
制器的特征多项式是一个 Hurwitz 多项式:
Fig. 7 Block diagram of adaptive active vibration control
−1
−1
−1
−1
−1
P(z ) = A F (z )S 0 (z )− B F (z )R 0 (z ) (27)
system considering internal feedback
假设 4(完美匹配条件):内部正反馈回路可以完
在前馈控制器中引入 Youla-Kučera 参数化滤波
美地抵消主通道 D 产生的振动,并且确保整个控制
器后,滤波器 Q(z )的输入信号为 α(n),可以表示为: 系统输出误差最小。存在一组最优 Q 滤波器参数
−1
−1
−1
α(n) = A(z )y(n)− B(z )u(n) (20) 值,使得:
在 Youla-Kučera 参数化背景下,A 和 B 表示被控对象 S · A F (R 0 − A F Q)
= −D (28)
的 离 散 时 间 传 递 函 数 模 型 的 分 母 和 分 子 多 项 式 。 A F S 0 − B F R 0