
Page 268 - 《振动工程学报》2025年第11期
P. 268
2726 振 动 工 程 学 报 第 38 卷
表 5 增益参数组合的正交表 编号1 编号2 编号3
编号4 编号5 编号6
Tab. 5 Orthogonal table of gain parameter combinations 编号7 编号8 编号9
3
编号 a b c
2
1 −2 3 −2
2 −2 6 0
1
幅值
3 −2 9 2
0
4 0 3 0
5 0 6 2 −1
6 0 9 −2
−2
7 2 3 2 0 0.5 1.0 1.5 2.0
时间 / s
8 2 6 −2
(a) 误差信号的波形
9 2 9 0 (a) Wave-forms of error signals
80
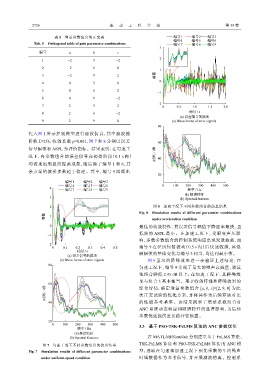
代入图 1 所示控制模型进行滤波仿真,其中滤波器
阶数 L=256,收敛系数 μ=0.001,图 7 和 8 分别以误差 60
信号幅值和 ASPL 为评价指标。结果表明:在匀速工
况下,各参数组合的误差信号在初始阶段(0.1 s 内) ASPL / dB 40
均表现出明显的振荡现象,随后除了编号 1 和 8,其
余方案的波形多数趋于稳定。其中,编号 9 展现出
20
编号1 编号2 编号3
编号4 编号5 编号6 0 100 200 300 400 500
4
编号7 编号8 编号9 频率 / Hz
(b) 频谱特征
3 (b) Spectral features
2 图 8 加速工况下不同参数组合的仿真结果
Fig. 8 Simulation results of different parameter combinations
幅值 1 under acceleration condition
0 最佳的收敛特性,其误差信号幅值下降速率最快,且
−1 低频的 ASPL 最小。在加速工况下,受瞬变声压影
响,多数参数组合的控制系统响应出现发散振荡,而
−2
0 0.1 0.2 0.3 0.4 0.5 编号 9 在经历短暂波动(0.5 s 内)后快速收敛,其低
时间 / s
(a) 误差信号的波形 频幅值的整体变化与编号 3 相当,均达到最小值。
(a) Wave-forms of error signals 图 9 显示的降噪效果进一步验证上述结论:在
80
匀速工况下,编号 9 实现了最大的噪声衰减量,较其
他组合降低 2.45 dB 以上;在加速工况下,其降噪效
果与组合 3 基本相当。基于收敛特性和降噪效果的
60 综合评估,确定增益参数组合 [a, b, c]=[2, 9, 0] 为此
ASPL / dB 次正交试验的优化方案,并将其作为后续算法对比
40 的性能参考基准。该结果揭示了增益系数组合对
ANC 系统动态响应和频谱特性的显著影响,为后续
参数优化提供重要的评估依据。
20
0 100 200 300 400 500 3.3 基于 算法的 参数优化
频率 / Hz PSO-TSK-FxLMS ANC
(b) 频谱特征
(b) Spectral features 在 MATLAB/Simulink 分别建立基于 FxLMS 算法、
图 7 匀速工况下不同参数组合的仿真结果 TSK-FxLMS 算法和 PSO-TSK-FxLMS 算法的 ANC 模
型,选取在匀速和加速工况下预先采集的车内噪声
Fig. 7 Simulation results of different parameter combinations
under uniform-speed condition 时域数据作为参考信号,并开展滤波仿真。控制系