
Page 267 - 《振动工程学报》2025年第11期
P. 267
第 11 期 张恩来,等:粒子群优化的车内模糊主动噪声控制方法 2725
群,赋值模糊控制增益参数(k p 、k i 和 k d ),并设置其优
100
化范围;(2)输入参考信号,在 MATLAB/Simulink 运
行基于 TSK-FxLMS 算法的 ANC 模型,根据输出的 50
误差信号计算每个粒子适应度值;(3)评估个体和群
体的最佳适应度,通过更新粒子的位置与速度调整 ASPL / dB 0
控制参数,优化 ANC 系统性能;(4)当适应度函数达
到最小且趋于稳定,则输出最优的控制参数组合。 −50
−100
3 电 动 客 车 车 内 噪 声 信 号 采 集 试 验 20 100 1000 5000 20000
频率 / Hz
与 ANC 仿 真 (a) 匀速工况
(a) Uniform-speed condition
3.1 车内噪声采集试验及频谱分析 100
为 验 证 上 述 基于 PSO-TSK-FxLMS 算 法 的 ANC
50
有效性和优越性,以电动客车驾驶员位置的车内环
境噪声为研究案例,根据《客车车内噪声限值及测量 ASPL / dB 0
[1]
方法》(GB/T 25982—2024) ,采集 10~50 km/h 加速
和 50 km/h 匀速 2 种工况的噪声信号,测试点场景和 −50
仪器如图 5 所示,采集仪器为 LMS Test. Lab 系统及
−100
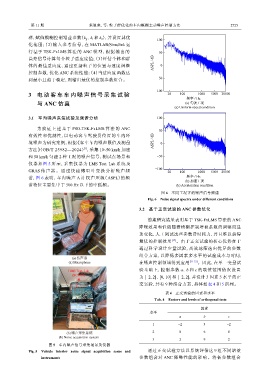
GRAS 传 声 器 。 通 过 快 速 傅 里 叶 变 换 分 析 噪 声 频 20 100 1000 5000 20000
谱,图 6 表明,车内噪声 A 计权声压级(ASPL)的频 频率 / Hz
(b) 加速工况
谱特征主要集中于 500 Hz 以下的中低频。 (b) Acceleration condition
图 6 不同工况下的噪声信号频谱
传声器 Fig. 6 Noise signal spectra under different conditions
(46AE)
3.2 基于正交试验的 ANC 参数优化
前期研究结果表明基于 TSK-FxLMS 算法的 ANC
降噪效果和性能随着模糊控制增益系数的调整而显
著变化,人工调试这些参数费时耗力,并且难以获得
最优的控制效果 [17] 。由于正交试验的核心优势在于
通过科学设计少量试验,高效地筛选出优异的参数
组合方案,以降低多因素多水平的试验成本与时间,
(a) 传声器
(a) Microphone 在噪声控制领域得到应用 [21-22] 。因此,在单一变量试
LMS Test. Lab 验基础上,控制参数 a、b 和 c 的取值范围依次设置
(SCM05)
为 [−2, 2]、[0, 10] 和 [−2, 2],并设计 3 因素 3 水平的正
交实验,共有 9 种组合方案,具体如表 4 和 5 所列。
表 4 正交试验的因素和水平
Tab. 4 Factors and levels of orthogonal tests
因素
水平
a b c
1 −2 3 −2
(b) 噪声采集系统 2 0 6 0
(b) Noise acquisition system
3 2 9 2
图 5 车内噪声信号采集场景及仪器
Fig. 5 Vehicle interior noise signal acquisition scene and 通过正交试验方法以系统评估这 9 组不同增益
instruments 参数组合对 ANC 降噪性能的影响。将各参数组合